Préparation d’un modèle temps réel
La préparation d’un modèle Simscape pour une exécution temps réel implique de trouver de manière itérative le juste équilibre entre performances et fidélité pour produire des résultats précis à un coût et un pas de temps suffisamment réduits pour la machine cible. Commencez par obtenir les résultats de référence de votre modèle. Une fois qu’il produit des résultats précis par rapport à ceux de référence avec un solveur à pas fixe, vous pouvez tenter de le déployer sur la cible temps réel. Suivez les étapes ci-dessous si nécessaire pour équilibrer les performances et la fidélité :
Utilisez des blocs idéaux ou au niveau système ainsi que des paramétrages idéaux au lieu de blocs et paramètres plus complexes.
Supprimez les sources de dynamique rapide.
Supprimez les sources de raideur numérique.
Supprimez les sources de passages par zéro.
Utilisez le solveur de partitionnement.
Partitionnez le modèle.
Réduisez le nombre d’itérations du solveur au minimum.
Pour le déploiement sur FPGA, réduisez les sources de modes.
Pour analyser les performances du solveur en matière de dynamique rapide et de raideur numérique, utilisez l’outil Solver Profiler. Lorsque vous êtes prêt à passer à un coût et un pas fixes, utilisez la fonction simscape.getLocalSolverFixedCostInfo pour déterminer le nombre d’itérations non linéaires à effectuer.
Outils
| Solver Profiler | Identify solver performance bottlenecks |
Fonctions
simscape.getLocalSolverFixedCostInfo | Determine iteration requirement when transitioning to fixed cost (depuis R2021b) |
Rubriques
Configuration à pas fixe et à coût fixe
- Examine Model Dynamics Using Solver Profiler
Identify factors affecting model simulation using the Solver Profiler. - Solvers for Real-Time Simulation
The fixed-step solver, step size, and number of iterations that you specify affect how your Simscape™ model simulates in real time. - Identify and Resolve System Stiffness in Simscape Models
Analyze the effect of particular block variables on overall system stiffness of a Simscape network. - Define Step Size and Number of Nonlinear Iterations for Simscape Real-Time Simulation
Determine the step size and number of nonlinear iterations for fixed-step, fixed-cost simulation. - Estimate Computation Costs
Determine if your Simscape model is likely to cause an overrun when you simulate it on your real-time target machine by estimating computational costs.
Optimisation des performances
- Reduce Zero Crossings
Eliminate components that cause zero crossings to increase the minimal step-size for fixed-step simulation and to make your Simscape model real-time capable. - Increase Simulation Speed Using the Partitioning Solver
Improve performance by using the Simscape Partitioning solver to convert a large system of equations into several smaller systems of equations that are easier to solve.
Déploiement sur FPGA
- Get Started with Simscape Hardware-in-the-Loop Workflow (HDL Coder)
Simscape Hardware-in-the-Loop workflow modeling guidelines and restrictions. - Simscape Language Support for FPGA HIL Deployment (HDL Coder)
Simscape language support in Simscape Hardware-in-the-Loop Workflow. - Modeling Guidelines for Simscape Subsystem Replacement (HDL Coder)
Simscape modeling best practices for replacing Simscape subsystem with state-space algorithm. - Replace Piecewise-Constant Resistor with Switched Linear Components (HDL Coder)
Convert a Simscape model with nonlinear component into a switched linear model. - Estimate Achievable Target Frequency Without Running Synthesis (HDL Coder)
Estimate the optimal frequency that you want your Simscape models to achieve on FPGA without running synthesis. - Modeling Techniques for Simscape Converters for FPGA HIL Deployment (HDL Coder)
Model your power electronic converter by using hardware-in-the-loop (HIL) simulation in a real-time target machine.
Plateformes génériques
- Requirements for Using Alternative Platforms
Follow the recommendations for minimum hardware, software, and compiler specifications to deploy your Simscape model for hardware-in-the-loop (HIL) simulation using a custom standalone application. - Embedded and Generic Real-Time Resources
Simulink® Coder™ and Embedded Coder® use system target files (STFs) to generate code for interfacing with specific real-time operating systems.
Sélection d՚exemples
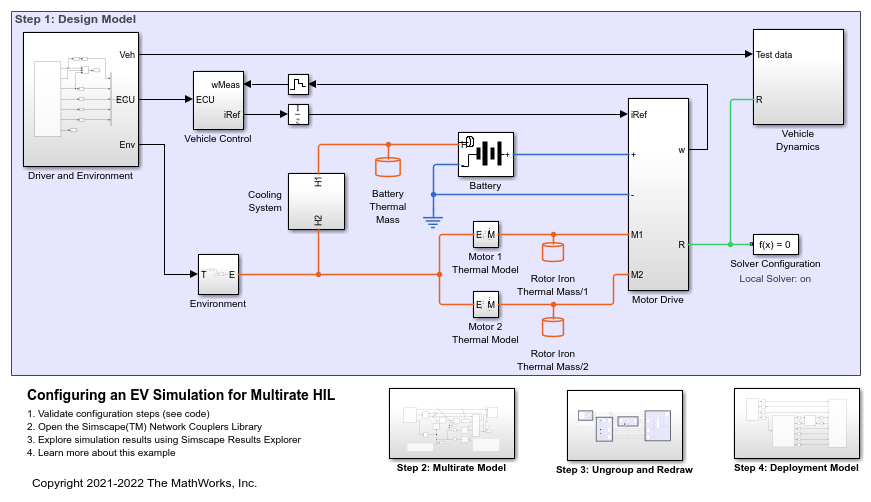
Configuring an EV Simulation for Multirate HIL
An electric vehicle model suitable for multirate Hardware-In-the-Loop (HIL) deployment. The example uses the Simscape™ Network Couplers Library to split the model into separate Simulink® subsystems that can be deployed at different sample rates. This allows you to run parts of the system (for example thermal components) with a slower sample time thereby reducing overall computational cost.
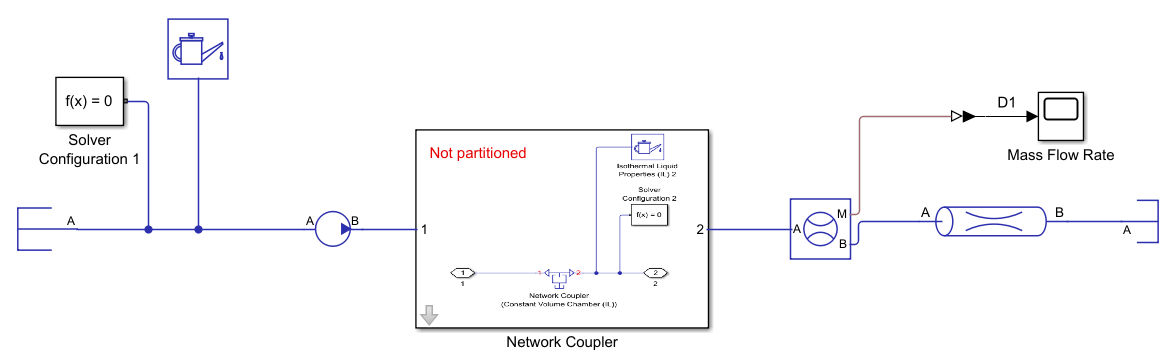
Partition a Model By Using a Network Coupler Block
Partition a Simscape model for parallel processing on real-time processors.