Derivative
Calcul de la dérivée continue approximative d'un signal d'entrée continu par rapport au temps
Bibliothèques :
Simulink /
Continuous
Description
Le bloc Derivative approxime la dérivée continue du signal d'entrée continu u par rapport au temps de simulation t. Utilisez le bloc Derivative lorsque vous devez calculer la dérivée d'un signal différentiable dont le temps d'échantillonnage est continu.
Toute utilisation incorrecte du bloc Derivative peut entraîner des inexactitudes dans les résultats de la simulation. Lorsque cela s’avère possible, pensez à considérer les alternatives suivantes au bloc Derivative :
Réorganisez les équations du système pour résoudre une intégrale au lieu d'une dérivée. Structurez ensuite le modèle sur la base des nouvelles équations de sorte que le software opère une intégration en utilisant des blocs tels que le bloc Integrator plutôt qu’une différenciation.
Pour un exemple, consultez la rubrique Best-Form Mathematical Models.
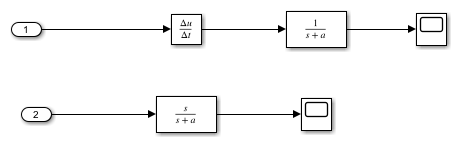
Lorsqu’un bloc Transfer Fcn agit également sur un signal d’entrée ou de sortie du bloc Derivative, implémentez la dérivée pour le signal en ajoutant plutôt un zéro à la fonction de transfert.
Pour calculer la différence finie ou le quotient de différences, pour un signal discret dans un système discret, utilisez le bloc Discrete Derivative.
Lorsque vous devez utiliser le bloc Derivative, utilisez le bloc uniquement avec des signaux d'entrée différentiables présentant un temps d'échantillonnage continu.
Le software émet un avertissement lorsque le signal connecté à ce port présente un temps d'échantillonnage discret ou fixé en mineur. (depuis R2023b)
Bien que le software n'émette pas d'avertissement lorsque le signal d'entrée présente un temps d'échantillonnage constant, le réglage de la valeur du signal introduit une discontinuité dans le signal d'entrée. La différenciation à travers ces discontinuités génère des pics dans le signal de sortie.
Pour calculer la différence finie ou le quotient de différences, pour un signal discret dans un système discret, utilisez le bloc Discrete Derivative.
Assurer la précision de l’approximation des dérivées continues
Lorsque vous utilisez le bloc Derivative, vous devez vous assurer que la précision du signal de sortie du bloc répond à vos exigences. Même dans un contexte approprié, la précision du signal de sortie du bloc Derivative dépend de la taille du pas et peut dépendre de la dynamique du reste du système.
Utilisez le paramètre Max step size pour empêcher un solveur à pas variable de faire des pas trop importants pour répondre à vos exigences de précision. Pour choisir une valeur appropriée pour la taille de pas maximale, vous pouvez être amené à effectuer plusieurs simulations.
Dans les simulations à pas variable, le solveur détermine la taille de chaque pas temporel principal en contrôlant l'erreur dans les calculs des états continus dans l'ensemble du modèle. Lorsque l'erreur de la valeur calculée pour un état continu dépasse les niveaux de tolérance indiqués, le solveur réduit la taille de pas jusqu'à ce que l'erreur soit de nouveau comprise dans la plage de tolérance.
Le bloc Derivative ne présente pas d'états continus. Par conséquent, le solveur ne peut pas ajuster la taille du pas pour s'assurer que les calculs du bloc Derivative répondent aux exigences de tolérance. Si le solveur adopte un grand pas temporel lorsque la valeur du signal d'entrée change rapidement, le bloc peut produire une valeur de sortie inattendue.
Exemples
Improved Linearization with Transfer Fcn Blocks
Improved Linearization with Transfer Fcn Blocks.
Ports
Entrée(s)
Sortie(s)
Paramètres
Caractéristiques des blocs
Types de données |
|
Traversée directe |
|
Signaux multidimensionnels |
|
Signaux de taille variable |
|
Détection des passages à zéro |
|
Algorithmes
Le bloc Derivative calcule la différence numérique pour approximer la dérivée continue où correspond au changement de la valeur du signal d'entrée et , à la taille du pas temporel principal que le solveur a pris pour atteindre le temps de simulation actuel. La précision de l'approximation de la dérivée continue dépend du taux de variation du signal d'entrée et de la taille du pas.
La valeur de sortie initiale du bloc Derivative est toujours 0. En tenant compte de la valeur de sortie initiale, cette équation représente la relation précise entre les signaux d'entrée et de sortie du bloc.
t correspond au temps de simulation actuel.
correspond à l'heure du dernier jalon principal atteint dans la simulation.