Continuous
Utilisez les blocs de la bibliothèque Continuous pour modéliser des équations différentielles. Vous pouvez utiliser la dérivée par rapport au temps d'un signal. Vous pouvez intégrer ou retarder un signal. Vous pouvez également modéliser des contrôleurs PID et des systèmes linéaires avec des fonctions de transfert ou des représentations d'état.
Blocs
| Derivative | Calcul de la dérivée continue approximative d'un signal d'entrée continu par rapport au temps |
| Descriptor State-Space | Model continuous linear system as system of implicit state-space equations |
| Entity Transport Delay | Introduce a delay in propagation of a SimEvents message |
| First Order Hold | Implement linearly extrapolated first order hold on input signal |
| Integrator | Integrate signal |
| Integrator Limited | Integrate signal |
| PID Controller | Continuous-time or discrete-time PID controller |
| PID Controller (2DOF) | Continuous-time or discrete-time two-degree-of-freedom PID controller |
| Second-Order Integrator | Second-order integration of input signal |
| Second-Order Integrator Limited | Second-order integration of input signal |
| State-Space | Implémenter un système de représentation d’état linéaire |
| Transfer Fcn | Modéliser un système linéaire avec une fonction de transfert |
| Transport Delay | Delay input by given amount of time |
| Variable Time Delay | Delay input by variable amount of time |
| Variable Transport Delay | Delay input by variable amount of time |
| Zero-Pole | Model system using zero-pole-gain transfer function |
Rubriques
- Model a Continuous System
Model a system with variables defined at all time values.
Sélection d՚exemples
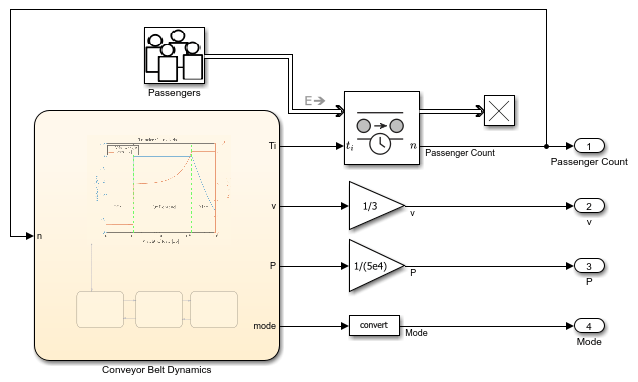
Model Conveyor Belt as Cyber-Physical System
Model a variable-speed conveyor belt as a cyber-physical system by combining continuous-time, discrete-event, and finite-state modeling techniques. The model in this example integrates the modeling techniques required to represent the cyber-physical system into a single simulation environment by using Simulink®, SimEvents®, and Stateflow®.
Ressources pédagogiques

Matériel virtuel et TP pour les systèmes de contrôle
Découvrir les concepts liés au design de systèmes d’asservissement en boucle ouverte/fermée, au calcul de fonctions de transfert et à l’analyse de position.