Specify Initial State for Simulation
This example shows the difference between specifying the initial state for a simulation using final states saved with and without the model operating point. Specifying initial states for a simulation can save time when you run a set of simulations. For example, suppose you need to simulate several scenarios for a system that has an initialization phase. If the initialization phase is the same for all scenarios, you can simulate the initialization phase once, save the operating point, and use that operating point as the initial state for all the simulations.
When you want to continue a simulation from a given state, use the model operating point. A model operating point contains complete information about the state of the model and simulation, including the simulation time for the snapshot and the state of the solver and execution engine. When you use a model operating point as the initial state for a simulation, the simulation results match results from a simulation without an initial state, and you do not need to specify the start time for the model. When you specify initial states without the operating point, the simulation results can differ from an equivalent simulation that does not run from an initial state.
For more information about the difference between final states with and without the operating point, see Save Block States and Simulation Operating Points.
Open and Simulate Model
Open the model slexVariableTransportDelay, which models the relationship between the vertical displacement of the front and rear wheels for a car. For more information about the model, see Simulating Systems with Variable Transport Delay Phenomena.
modelName = "slexVariableTransportDelay";
open_system(modelName)
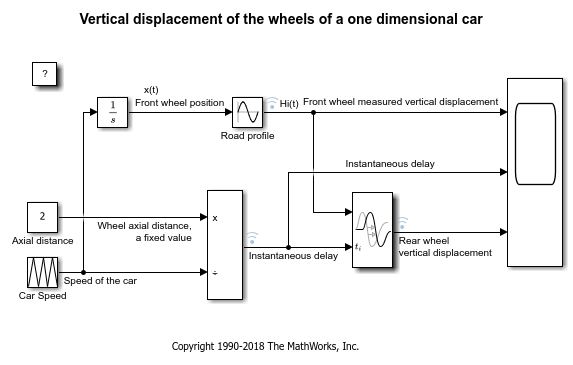
This example uses a model with the Variable Transport Delay block to illustrate a key difference between saving final states and saving final states with the operating point. Some blocks, including the Variable Transport Delay block, use information to compute output values that is not included in the logged block state. This information is included in the Simulink.op.ModelOperatingPoint object created when you save final states with the final operating point for the model.
Create a Simulink.SimulationInput object to specify model parameters to use in the baseline simulation. Configure the model to simulate from 0 to 10 seconds. Use the OutputTimes parameter to ensure that the model computes output values for simulation times of 0, 5, and 10.
siminBaseline = Simulink.SimulationInput(modelName); siminBaseline = setModelParameter(siminBaseline,'StartTime','0','StopTime','10',... 'OutputOption','AdditionalOutputTimes','OutputTimes','[0 5 10]');
Simulate the model to create baseline results.
baseline = sim(siminBaseline);
Specify Initial State for Simulation Using Model Operating Point
To see how the model operating point allows you to resume a simulation, simulate the model for 5 seconds and save the final operating point. Then, simulate the model again from 5 seconds to 10 seconds using the operating point as the initial state for the model.
Create a SimulationInput object to specify model parameters to use in the first simulation. Configure the model to simulate from 0 seconds to 5 seconds, and save the final states with the final operating point.
siminOP1 = Simulink.SimulationInput(modelName); siminOP1 = setModelParameter(siminOP1,'StartTime','0','StopTime','5',... 'SaveFinalState','on','SaveOperatingPoint','on');
Simulate the model for the first five seconds.
op1 = sim(siminOP1);
Create a SimulationInput object to specify model parameters for the second part of the simulation. When you use an operating point as the initial state for a simulation, do not specify the start time for the simulation. The simulation runs from the time saved in the snapshotTime property of the Simulink.op.ModelOperatingPoint object that contains the operating point data.
siminOP2 = Simulink.SimulationInput(modelName); siminOP2 = setModelParameter(siminOP2,'StopTime','10');
Specify the initial states for the second portion of the simulation as the operating point saved from the first part of the simulation. By default, the operating point is stored in a variable called xFinal and returned as part of the single simulation output as a field in a Simulink.SimulationOutput object.
siminOP2 = setInitialState(siminOP2,op1.xFinal);
Simulate the model from five seconds to ten seconds, using the final states without the operating point as the initial state.
op2 = sim(siminOP2);
Plot the results from the interrupted simulation that was resumed using the operating point alongside the results from the baseline simulation.
Get the Simulink.SimulationData.Dataset object that contains the signal data logged from the baseline simulation. The results are returned as a single Simulink.SimulationOutput object that contains the Dataset object with signal logging data in the variable logsout.
baselineResults = baseline.logsout;
Combine the logged signal data from the two segments of the interrupted simulation. First, create a copy of the logged signal data that will contain the combined simulation results.
opResults = op1.logsout;
In a for loop, access the timeseries objects that contain the time and signal data for each logged signal, and use the append function to concatenate the data in time. The Dataset object with the logged signal data contains a Simulink.SimulationData.Signal object for each signal. The Values property of the Signal object is a timeseries object that contains the data. This example uses curly braces ({}) to access the Signal objects in the Dataset objects by index.
for idx = 1:numElements(op1.logsout) ts1 = op1.logsout{idx}.Values; ts2 = op2.logsout{idx}.Values; opResults{idx}.Values = append(ts1,ts2); end
Plot the data on a 3-by-1 MATLAB® figure using a for loop to iterate through the elements of the Dataset object. This example uses curly braces ({}) to access the elements of the Dataset objects by index.
fig2 = figure(2); fig2.Name = "Simulation Resumed Using Operating Point"; for idx=1:numElements(baselineResults) ax = subplot(3,1,idx); plot(baselineResults{idx}.Values) hold on plot(opResults{idx}.Values,'r--') hold off grid on ax.Title.String = baselineResults{idx}.Values.Name; end
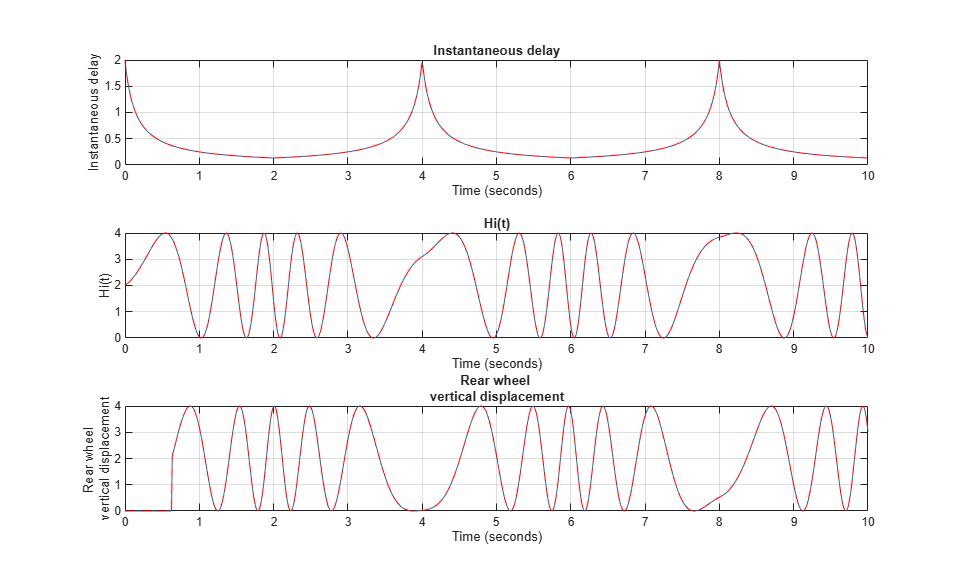
The results from the interrupted simulation that was resumed using the operating point match the results from the uninterrupted simulation.
Specify Initial State for Simulation Using Final States
To see how using final states without the model operating point can affect simulation results, simulate the model for 5 seconds and save the final states without the operating point. Then, simulate the model again from 5 seconds to 10 seconds, using the final states as the initial state for the simulation.
Create a SimulationInput object to specify model parameters to use in the first simulation. Configure the model to simulate from 0 seconds to 5 seconds and save the final states without the operating point.
siminStates1 = Simulink.SimulationInput(modelName); siminStates1 = setModelParameter(siminStates1,'StartTime','0','StopTime','5',... 'SaveFinalState','on');
Simulate the model for the first five seconds.
finalStates1 = sim(siminStates1);
Create a SimulationInput object to specify model parameters for the second part of the simulation. Configure the model to simulate from 5 seconds to 10 seconds. When you use final states without the operating point as the initial state for a simulation, the simulation time is not restored from the final states data. You must specify the start time for the simulation.
siminStates2 = Simulink.SimulationInput(modelName); siminStates2 = setModelParameter(siminStates2,'StartTime','5','StopTime','10');
Specify the initial states for the second portion of the simulation as the final states saved from the first part of the simulation. By default, final states are stored in a variable called xFinal and returned as part of the single simulation output as a field in a Simulink.SimulationOutput object.
siminStates2 = setInitialState(siminStates2,finalStates1.xFinal);
Simulate the model from five seconds to ten seconds. Use the final states without the operating point as the initial state.
finalStates2 = sim(siminStates2);
Plot the results for all ten seconds of simulation time side by side to see how resuming the interrupted simulation using final states affects the simulation results.
Combine the logged signal data from the two segments of the interrupted simulation. First, create a copy of the logged signal data that will contain the combined simulation results.
finalStatesResults = finalStates1.logsout;
In a for loop, access the timeseries objects that contain the time and signal data for each logged signal, and use the append function to concatenate the data in time. The Dataset object with the logged signal data contains a Simulink.SimulationData.Signal object for each signal. The Values property of the Signal object is a timeseries object that contains the data. This example uses curly braces ({}) to access the Signal objects in the Dataset objects by index.
for idx = 1:numElements(finalStates1.logsout) ts1 = finalStates1.logsout{idx}.Values; ts2 = finalStates2.logsout{idx}.Values; finalStatesResults{idx}.Values = append(ts1,ts2); end
Plot the data on a 3-by-1 MATLAB figure using a for loop to iterate through the elements of the Dataset object. This example uses curly braces ({}) to access the elements of the Dataset objects by index.
fig1 = figure(1); fig1.Name = "Simulation Resumed Using Final States Without Operating Point"; for idx=1:numElements(baselineResults) ax = subplot(3,1,idx); plot(baselineResults{idx}.Values) hold on plot(finalStatesResults{idx}.Values,'r--') hold off grid on ax.Title.String = baselineResults{idx}.Values.Name; end
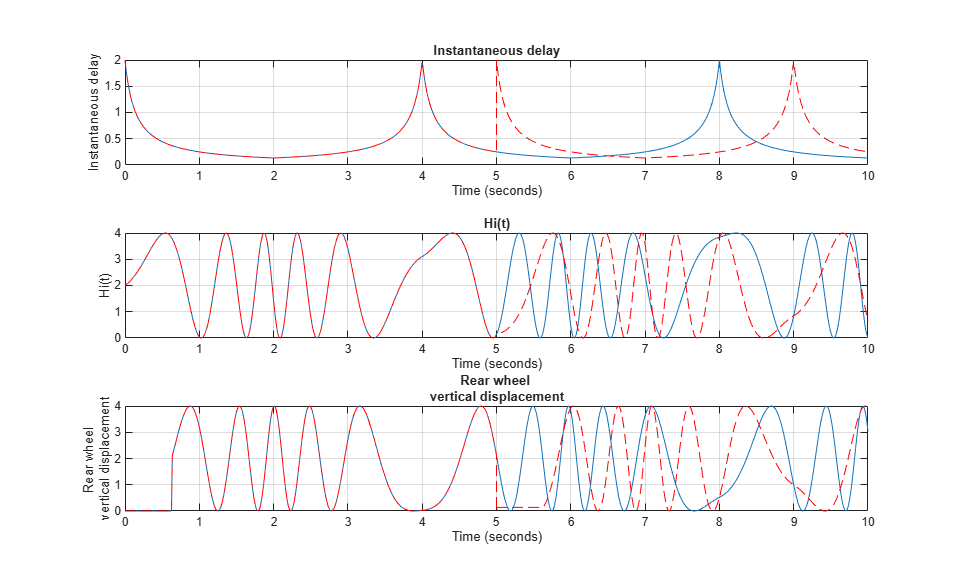
The simulation results diverge in the interrupted simulation after the simulation is resumed using the final states without operating point information. For this model, the final states alone do not provide enough information to continue the simulation as though it was never interrupted.