La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
Créer un modèle d’architecture avec des interfaces et des liens d’exigences
Dans cette section, découvrez comment créer un modèle d’architecture de bras robotisé avec System Composer™, définir des interfaces sur les ports et ajouter des liens d’exigences aux composants.
Découvrez comment :
Démarrer System Composer.
Ajouter des composants architecturaux afin de représenter les capteurs du bras robotisé, la planification de trajectoire et son mouvement.
Créer des ports et des connexions représentant l’échange de données.
Définir des interfaces de données représentant la structure des données.
Gérer les liens d’exigences représentant les connexions entre les éléments du modèle et les exigences.
Une licence Requirements Toolbox™ est requise pour lier, suivre et gérer les exigences dans System Composer.
Pour plus d’informations sur le workflow Model-Based Systems Engineering (MBSE) dans le cadre de System Composer, consultez Composer et analyser des systèmes au moyen de modèles d’architecture.
Représenter visuellement le système
L’implémentation d’un design architectural débute par la représentation visuelle du système au moyen de composants et de leurs connexions. Créez un modèle d’architecture, représentez les composants du système et tracez les connexions qui les relient.
Créer un modèle d’architecture
Saisissez cette commande dans la fenêtre de commande MATLAB®.
systemcomposer
La page d’accueil de Simulink® s’ouvre sur System Composer.
Cliquez sur Architecture Model.

System Composer propose des modèles d’architecture qui traitent de différents domaines de l’ingénierie système et de la modélisation de l’architecture logicielle : Architecture Model et Software Architecture Model. Tous les modèles d’architecture proposent les mêmes capacités structurelles avec certaines contraintes propres au domaine et à la plateforme. Pour plus d’informations sur les modèles d’architecture, consultez Choose Architecture Template for System Design.
Un nouveau canevas de modèle d’architecture vide s’ouvre. Vous pouvez identifier un modèle d’architecture par le badge situé dans l’angle inférieur gauche et par la palette de composants située sur la gauche.

Double-cliquez sur l’en-tête du modèle d’architecture et remplacez
untitledpar un nom de modèle descriptif, par exempleRobotDesign. En règle générale, le nom du modèle reflète le système dont vous créez l’architecture.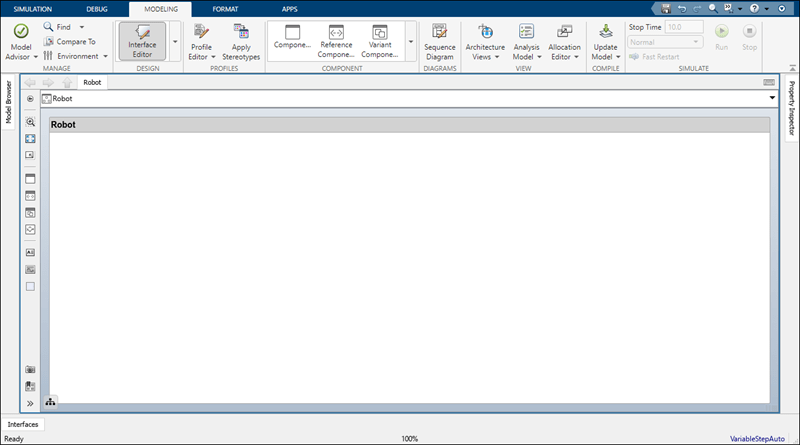
Enregistrez le modèle.
Concevoir les composants
Concevez un bras robotisé mobile doté d’un capteur détectant la position et d’un système de planification de trajectoire qui calcule un chemin menant à un emplacement que le mouvement du robot doit permettre d’atteindre. Un modèle d’architecture d’un système de ce type peut consister en trois composants principaux : Sensors, Trajectory Planning et Motion. Vous pouvez représenter ces composants dans System Composer au moyen de trois blocs Component.
Cliquez sur un bloc Component
 et faites-le glisser depuis la palette de gauche.
et faites-le glisser depuis la palette de gauche.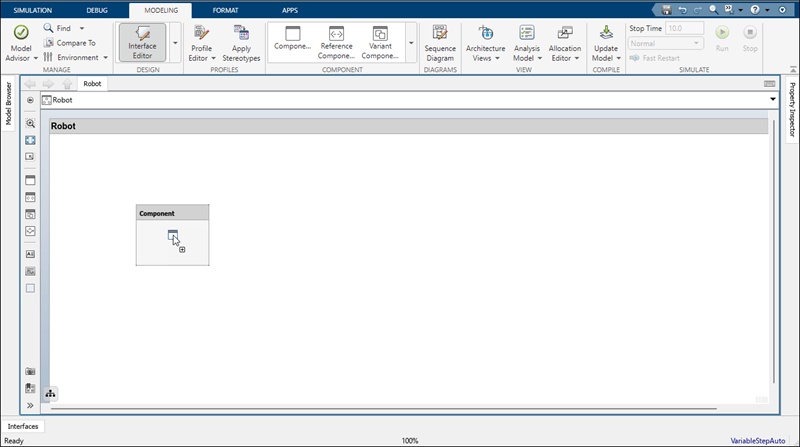
Renommez le composant en
Sensors.Suivez ces même étapes pour créer les composants
Trajectory PlanningetMotion, Procédez de la même manière pour...
Créer des ports et des connexions
Vous pouvez commencer à créer une connectivité entre les composants en décrivant le flux de puissance, d’énergie, de données ou de toute autre information représentative. Créez des ports sur les composants qui proposent ou consomment des informations et des connecteurs qui relient les ports pour deux composants afin de représenter le flux d’informations.
Vous pouvez ajouter un port à un composant sur n’importe quel côté, et le port peut avoir une direction d’entrée ou de sortie. Pour créer un port, placez votre curseur sur un côté du composant. Cliquez et relâchez pour afficher les options du port. Pour créer un port, sélectionnez Input, Output ou Physical. Renommez le port en lui attribuant un nom évocateur des informations qu’il transmet.
Créez un port de sortie au bas du composant Sensors. Renommez-le en SensorData.
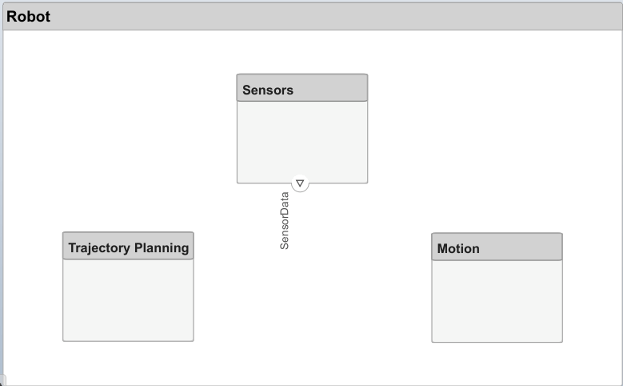
Cliquez et tracez une ligne depuis le port de sortie SensorData vers le composant
Motion. Lorsqu’un port d’entrée est créé côté composant, relâchez le pointeur. Par défaut, ce nouveau port porte le même nom que le port source.Placez votre curseur à l’angle de la ligne SensorData jusqu’à voir apparaître l’icône de la branche
 . Faites un clic droit et tracez une ligne de branche vers le composant
. Faites un clic droit et tracez une ligne de branche vers le composant Trajectory Planning.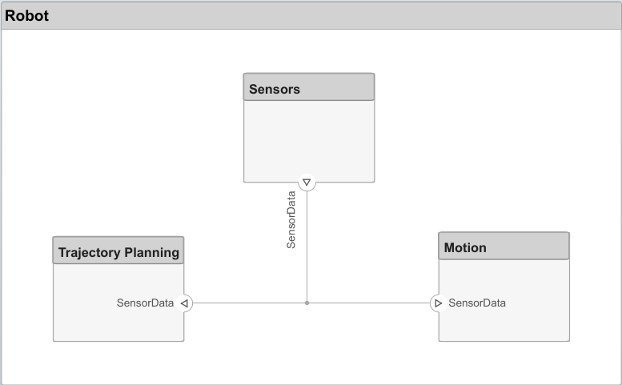
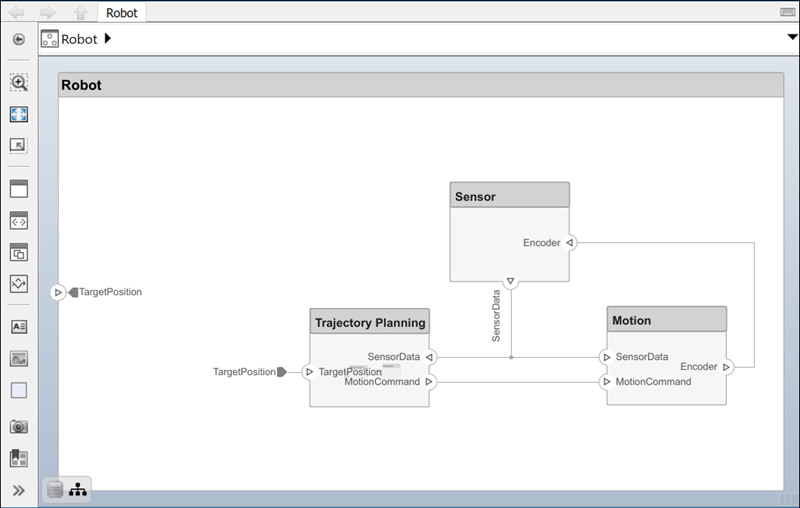
Établissez les connections présentées dans cette figure.

Le niveau racine du modèle d’architecture peut également comporter des ports qui décrivent l’interaction du système avec son environnement. Dans cet exemple, la position cible du robot est proposée par un ordinateur extérieur au robot lui-même. Représentez cette relation avec un port d’entrée.
Cliquez sur le bord gauche du modèle d’architecture et saisissez le nom du port TargetPosition.
Connectez un port d’architecture à un composant en faisant glisser une ligne depuis le port d’entrée TargetPosition vers le composant
Trajectory Planning. Les connexions vers ou depuis un port d’architecture se présentent sous forme de tags.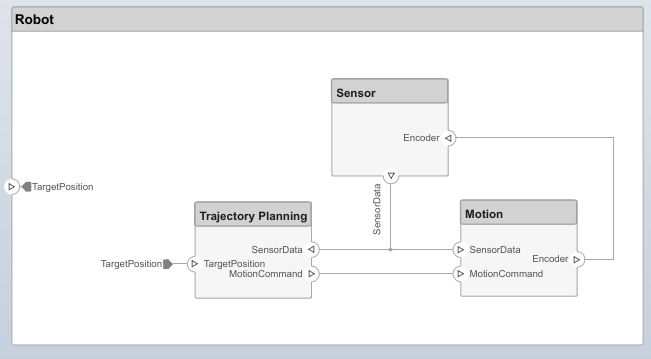
Modifier les interfaces de données
Vous pouvez définir une interface de données afin de spécifier complètement une connexion et ses ports associés. Une interface de données peut être constituée de plusieurs éléments de données présentant des dimensions, des unités et des types de données différents. Pour vérifier la cohérence lors de la connexion d’un port, vous pouvez également associer des interfaces à des ports non connectés lors du design des composants.
Spécifiez le flux d’informations entre les composants par le biais d’un port en configurant l’interface de données avec des attributs. Une interface de données peut se contenter d’envoyer une valeur entière, mais également transmettre un ensemble de nombres, une énumération, une combinaison de nombres et de chaînes de caractères ou un ensemble d’autres interfaces prédéfinies.
Intéressons-nous à l’interface de données entre les composants Sensors et Motion. Les données de capteurs se composent de ce qui suit :
Données de position de deux moteurs
Données concernant la proximité d’un obstacle issues de deux capteurs
Horodatage permettant d’évaluer le caractère actuel des données
Pour ouvrir l’Interface Editor, accédez à Modeling > Interface Editor.
Pour ajouter une interface de données, cliquez sur le bouton
 . Attribuez à l’interface le nom
. Attribuez à l’interface le nom sensordata.L’interface de données est nommée et définie séparément du port d’un composant avant de lui être affectée.
Cliquez sur le port de sortie SensorData du composant
Sensors. Dans l’Interface Editor, faites un clic droit sursensordataet sélectionnez Assign to Selected Port(s).Si vous cliquez une nouvelle fois sur
sensordata, les trois ports SensorData sont mis en surbrillance, ce qui indique que les ports connectés sont associés à cette interface.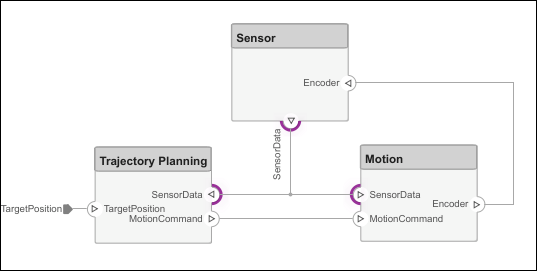
Ajoutez un élément de données à l’interface de données sélectionnée. Cliquez sur le bouton
 pour ajouter un élément de données et attribuez-lui le nom
pour ajouter un élément de données et attribuez-lui le nom timestamp.Ajoutez d’autres éléments de données à l’interface de données comme indiqué en cliquant sur le bouton correspondant.
Nom Type Unités timestampdoublesecondsdirection1doubledegreesdirection2doubledegreesdistance1doublemetersdistance2doublemetersposition1doubledegreesposition2doubledegreesModifiez les propriétés d’un élément de données dans l’Interface Editor. Cliquez sur la cellule correspondant à l’élément de données dans la table et ajoutez des unités comme l’indique la spécification.
Pour enregistrer l’interface de données dans un dictionnaire de données, cliquez sur la liste déroulante à côté du bouton
 . Un dictionnaire de données permet de gérer et de partager collectivement un ensemble d’interfaces entre les modèles. Par exemple, plus tard dans le design, si vous choisissez de modéliser l’ordinateur externe sous la forme d’un modèle d’architecture distinct, ce modèle et le modèle
. Un dictionnaire de données permet de gérer et de partager collectivement un ensemble d’interfaces entre les modèles. Par exemple, plus tard dans le design, si vous choisissez de modéliser l’ordinateur externe sous la forme d’un modèle d’architecture distinct, ce modèle et le modèle Robotpourront partager le même dictionnaire de données. Ici, le dictionnaire est enregistré sous le nomRobotDD.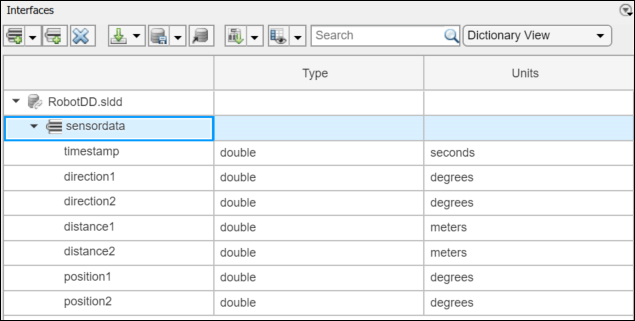
Décomposer des composants
Chaque composant peut disposer de sa propre architecture. Double-cliquez sur un composant pour le décomposer en sous-composants.
Double-cliquez sur le composant
Trajectory Planning. La barre d’exploration et Model Browser indiquent la position du composant dans la hiérarchie du modèle.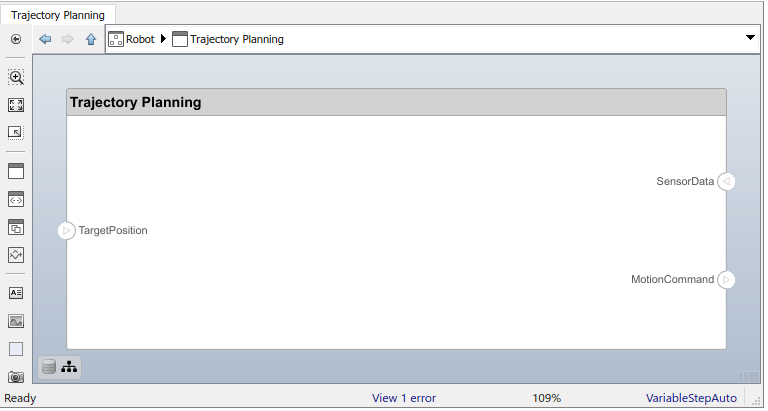
Ce composant commence par utiliser les données de position du moteur qui font partie de l’interface
sensordatapour calculer la position idéale et la commande de vitesse. Il traite ensuite les informations relatives à la distance de l’obstacle dans la même interface afin de conditionner cette commande de mouvement en fonction de certaines règles de sécurité.Ajoutez les composants
Motion ControletSafety Rulesen tant que parties intégrantes de l’architectureTrajectory Planning.Faites glisser le port TargetPosition vers le composant
Motion Control. Ajoutez un port de sortie Command àMotion Control, puis tracez une ligne vers le composantSafety Rules. Tracez des lignes depuis le port SensorData vers les composantsMotion ControletSafety Rules.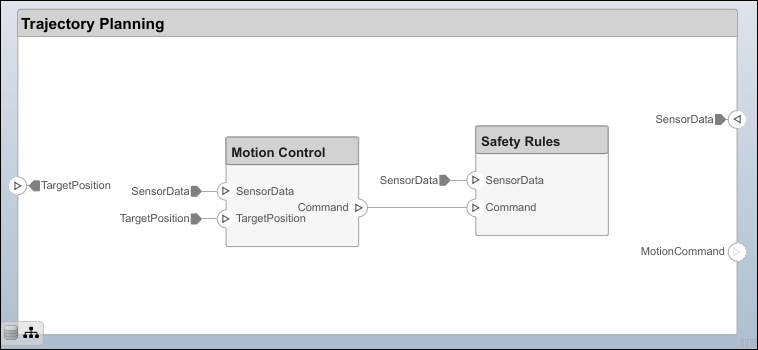
Modèle d’architecture d’un bras robotisé
Ouvrez le modèle d’architecture d’un bras robotisé composé de capteurs, d’actionneurs de mouvement et d’un algorithme de planification. Vous pouvez utiliser System Composer pour visualiser les interfaces et gérer les exigences de ce modèle.
Gérer les liens d’exigences
Les exigences font partie intégrante du processus d’ingénierie système. Certaines exigences portent sur la fonctionnalité de l’ensemble du système, d’autres sur des aspects de performance tels que la puissance, la taille et le poids. La décomposition des exigences de haut niveau en exigences de bas niveau et la dérivation d’exigences supplémentaires sont déterminantes pour l’architecture de l’ensemble du système. Par exemple, la consommation d’énergie globale du robot détermine la consommation d’énergie de son contrôleur.
Pour allouer et tracer les exigences avec les éléments du système, System Composer s’intègre entièrement à Requirements Toolbox. Pour dériver les exigences qui conviennent, vous devrez éventuellement analyser et spécifier les propriétés (telles que la puissance) des éléments du système, y compris les composants, les ports ou les connecteurs. Par exemple, si le coût total du système constitue une préoccupation, une propriété unitPrice est nécessaire.
Gérez les exigences à partir du Requirements Perspective de System Composer au moyen de Requirements Toolbox. Accédez à Apps > Requirements Manager. Pour plus d’informations, consultez Afficher et lier des exigences dans Simulink (Requirements Toolbox).
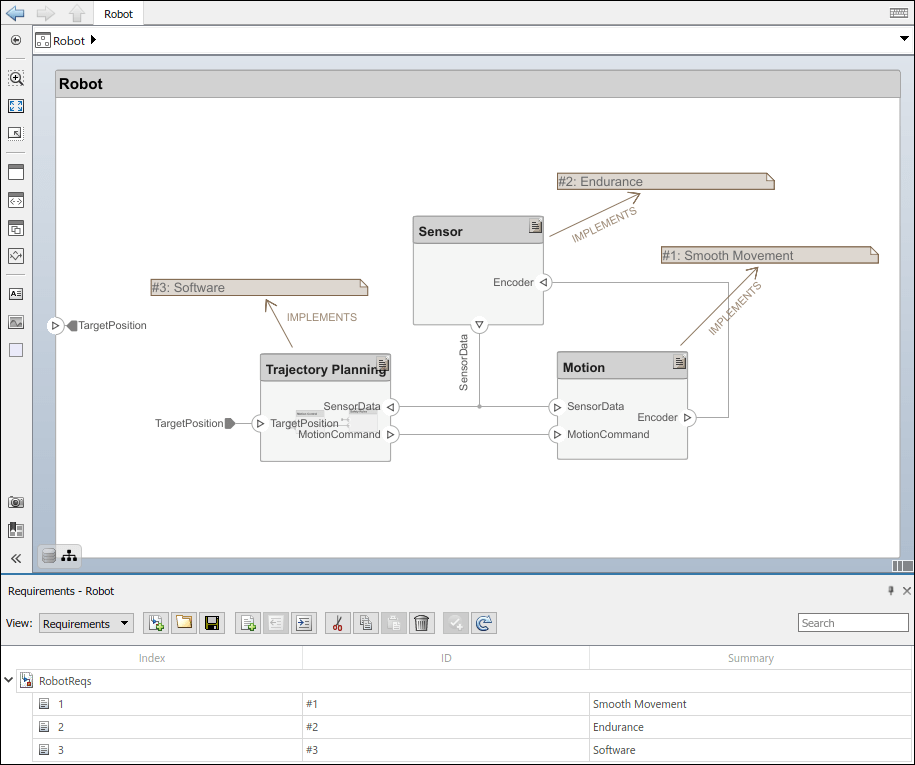
Pour améliorer la traçabilité des exigences, liez les exigences aux composants architecturaux et aux ports. Lorsque vous cliquez sur un composant dans le Requirements Perspective, les exigences liées sont mises en surbrillance. À l’inverse, lorsque vous cliquez sur une exigence, les composants liés sont affichés. Pour créer directement un lien, faites glisser une exigence vers un composant ou un port.
Voir aussi
Rubriques
- Étendre le design architectural au moyen de stéréotypes
- Analyser les propriétés des modèles d’architecture au moyen de la fonction d’analyse
- Inspecter les composants dans les vues architecture personnalisées
- Implémenter des comportements de simulation de modèles d’architecture
- Concepts de System Composer