La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
Systèmes de coordonnées
Vous pouvez spécifier des localisations dans des images en utilisant divers systèmes de coordonnées. Les systèmes de coordonnées sont utilisés pour placer les éléments en relation les uns avec les autres. Les coordonnées en pixel et en systèmes de coordonnées spatiales se rapportent à des localisations dans une image. Les coordonnées en systèmes de coordonnées 3D décrivent le positionnement 3D et l’origine du système.
Indices des pixels
Les coordonnées de pixels permettent de définir des localisations dans des images. Dans le système de coordonnées de pixel, l’image est traitée comme une grille d’éléments discrets, rangés de haut en bas et de gauche à droite.
![]()
Pour les coordonnées de pixel, le nombre de lignes, r, augmente en allant du haut vers le bas, tandis que le nombre de colonnes, c, augmente en allant vers la droite. Les coordonnées de pixel sont des valeurs entières et varient entre 1 et la longueur de la ligne ou de la colonne. Les coordonnées de pixel utilisées dans le software Computer Vision Toolbox™ sont one-based, conformes aux coordonnées de pixel utilisées par Image Processing Toolbox™ et MATLAB®. Pour plus d’informations sur les systèmes de coordonnées de pixel, veuillez consulter Pixel Indices.
Coordonnées spatiales
Les coordonnées spatiales permettent de définir une localisation dans une image avec une plus grande granularité que les coordonnées de pixel. Par exemple, dans le système de coordonnées pixel, un pixel est traité comme une unité discrète, identifiée de façon unique par une paire d'entiers ligne et colonne, tel que (3,4). Dans le système de coordonnées spatiales les localisations dans une image sont représentées en termes de pixels partiaux, telles que (3,3, 4,7).

Pour plus d’information sur les systèmes de coordonnées spatiales, veuillez consulter Spatial Coordinates.
Systèmes de coordonnées 3D
Pour reconstituer une scène 3D, il est possible de définir les points 3D qui en résultent dans un des deux systèmes de coordonnées. Dans un système de coordonnées basé sur une caméra, les points sont définis par rapport au centre de l’appareil. Dans un système de coordonnées basé sur un motif de calibrage, les points sont définis par rapport à un point dans la scène.
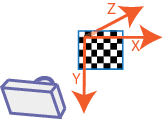
Les fonctions Computer Vision Toolbox utilisent le système de coordonnées droitier. Dans ce système, l’axe x pointe vers la droite, l’axe y pointe vers le bas, et l’axe z pointe dans le sens inverse de la caméra. Pour afficher les points 3D, utilisez pcshow.
Le système de coordonnées basé sur la caméra
Les points représentés dans un système de coordonnées basé sur la caméra sont décrits avec une origine située au niveau du centre optique de la caméra.

Dans un système stéréo, l’origine se trouve au niveau du centre optique de la caméra 1.

Pour reconstituer une scène 3D en utilisant une caméra calibrée en stéréo, les fonctions reconstructScene et triangulate retournent des points 3D dont l’origine se trouve au niveau du centre optique de la caméra 1. Pour utiliser des images Kinect®, la fonction pcfromkinect retourne les points 3D dont l’origine se trouve au niveau du centre optique de la caméra RGB.
Le système de coordonnées basé sur motif de calibrage
Les points représentés dans un système de coordonnées basé sur un motif de calibrage, sont décrits avec une origine située à l’emplacement (0,0) du motif de calibrage.
Lors de la reconstitution d’une scène 3D à partir de multiples vues comportant un motif de calibrage, les points 3D qui en résultent sont définis dans le système de coordonnées basé sur le motif. Cet exemple Structure from Motion from Two Views illustre comment reconstituer une scène 3D à partir de deux images 2D comportant un motif en damier.