worldToImage
(Not recommended) Project world points into image
worldToImage is not recommended. Use the world2img
function instead. For more information, see Version History.
Syntax
Description
imagePoints = worldToImage(intrinsics,tform,worldPoints)worldPoints into points on an
image, imagePoints. intrinsics can be
a cameraIntrinsics or a fisheyeIntrinsics
object. tform is a rigid3d
object.
imagePoints = worldToImage(intrinsics,rotationMatrix,translationVector,worldPoints)
[
also returns the indices of valid image points that are within the boundary of
the image using any of the previous syntax inputs.imagePoints,validIndex] = worldToImage(___)
[___] = worldToImage(___'ApplyDistortion',
returns the projection with the option of applying distortion. This syntax is
supported for nonfisheye camera parameters.distort)
Examples
Create a set of calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr"));
Detect the checkerboard corners in the images.
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
Generate the world coordinates of the checkerboard corners in the pattern-centric coordinate system, with the upper-left corner at (0,0).
squareSize = 29; % in millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
imageSize = size(readimage(images,1));
cameraParams = estimateCameraParameters(imagePoints,worldPoints, ...
ImageSize=imageSize(1:2));Load the image at a new location.
imOrig = imread(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr","image9.jpg")); imshow(imOrig);

Undistort the image.
imUndistorted = undistortImage(imOrig,cameraParams);
Find a reference object in the new image.
[imagePoints,patternDims] = detectCheckerboardPoints(imUndistorted);
Compute new extrinsics.
[R,t] = extrinsics(imagePoints,worldPoints,cameraParams);
Add a z-coordinate to the world points.
zCoord = zeros(size(worldPoints,1),1); worldPoints = [worldPoints zCoord];
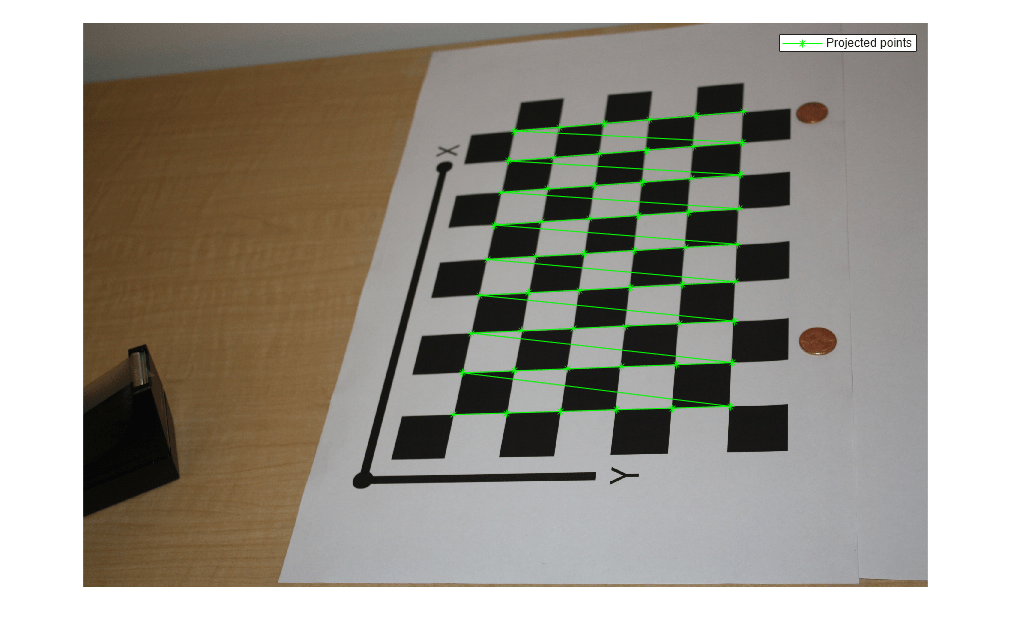
Project the world points back into the original image.
projectedPoints = worldToImage(cameraParams,R,t,worldPoints); hold on plot(projectedPoints(:,1),projectedPoints(:,2),"g*-"); legend("Projected points"); hold off
Input Arguments
Transformation of the camera in world coordinates, specified as a rigid3d object.
Camera parameters, specified as a cameraIntrinsics or a fisheyeIntrinsics object. The objects store information about
a camera’s intrinsic calibration parameters, including the lens distortion
parameters.
3-D rotation of the world coordinates relative to the image coordinates,
specified as a 3-by-3 matrix. The rotation matrix, together with the
translation vector, enable you to transform points from the world coordinate
system to the camera coordinate system. The
rotationMatrix and
translationVector inputs must be the same data type.

Data Types: double | single
3-D translation of the world coordinates relative to the image
coordinates, specified as a 1-by-3 vector. The translation vector, together
with the rotation matrix, enable you to transform points from the world
coordinate system to the camera coordinate system. The
rotationMatrix and
translationVector inputs must be the same data type.
Data Types: double | single
3-D world points, specified as an M-by-3 matrix containing M [x,y,z] coordinates of 3-D world points.
If you use the tform input argument then the
worldPoints coordinates must be in the same units
as the Translation property of the
tform object.
Option to apply lens distortion, specified as false or
true. When you set this argument to
true, the function applies lens distortion to the
output imagePoints.
This argument is valid only when using a cameraParameters object as the
cameraParams input.
Output Arguments
Extended Capabilities
Version History
Introduced in R2016bSee Also
Apps
Functions
world2img|img2world2d|undistortImage|undistortPoints|estimateCameraParameters|estimateExtrinsics|fisheyeIntrinsics|pose2extr|extr2pose|estrelpose|estworldpose