matchingPursuit
Description
[
recovers the sparse signal Xr,YI,I,R] = matchingPursuit(A,Y)Xr using the
sensingDictionary
A and sensor measurement Y. By default, the sparse
recovery algorithm is matching pursuit. The I output is the support of
Xr identified by the matching pursuit algorithm. The
YI output is the best fit for Y corresponding to
the bases indexed by the elements of I, and R is
the residual.
[
specifies options using one or more name-value arguments in addition to the input argument
in the previous syntax. For example, Xr,YI,I,R] = matchingPursuit(___,Name=Value)[Xr,YI,I,R] =
matchingPursuit(A,Y,Algorithm="WMP") specifies the weak matching pursuit
algorithm.
Examples
Load a signal.
load cuspamaxCreate a sensing dictionary consisting of the basis types poly and walsh that can be applied to the signal.
lsig = length(cuspamax);
A = sensingDictionary(Size=lsig,Type={'poly','walsh'})A =
sensingDictionary with properties:
Type: {'poly' 'walsh'}
Name: {'' ''}
Level: [0 0]
CustomDictionary: []
Size: [1024 2048]
Use the dictionary to obtain a sparse approximation of the signal using weak matching pursuit.
[Xr,YI,I,R] = matchingPursuit(A,cuspamax, ... Algorithm="WMP",maxerr={"L2",1});
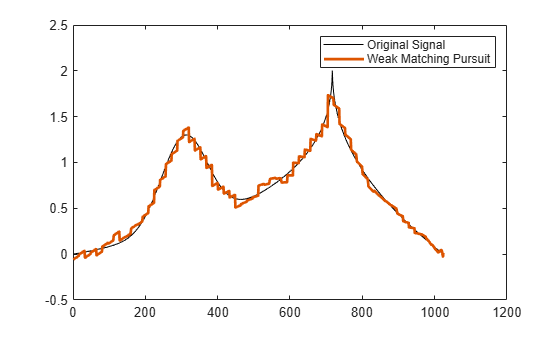
Plot the original signal and the approximation.
plot(cuspamax,"k") hold on plot(YI,LineWidth=2) legend("Original Signal","Weak Matching Pursuit") hold off
Extract the vectors from the dictionary that correspond to the approximation. Multiply with the associated coefficients and confirm the result is equal to the approximation.
Amat = subdict(A,1:1024,I); x = Amat*Xr(I,:); max(abs(x-YI))
ans = 0
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022a