step
Réponse indicielle d’un système dynamique
Syntaxe
Description
step calcule la réponse indicielle à un changement de pas de la valeur d’entrée de U à U + dU après les unités de temps td.

Ici,
t0 est l’instant de début de la simulation.
td est le retard de pas.
U est la valeur d’entrée ou le biais de référence.
dU est l’amplitude de pas.
Par défaut, la fonction applique step pour t0 = 0, U = 0, dU = 1 et td = 0. Mais vous pouvez configurer ces valeurs au moyen de RespConfig. Vous pouvez également spécifier l’état initial x(t0). Quand vous ne spécifiez pas l’état initial, step considère que le système est initialement au repos avec niveau d’entrée U.
[ simule la réponse pour les pas de temps spécifiés par y,tOut] = step(sys,t)t. Pour définir les pas de temps, vous pouvez spécifier :
L’instant de simulation finale au moyen d’une valeur scalaire.
Les instants de simulation initiale et finale au moyen d’un vecteur à deux éléments. (depuis R2023b)
Tous les pas de temps au moyen d’un vecteur.
[ spécifie des options supplémentaires pour le calcul de la réponse indicielle, telles que l’amplitude de pas ou le décalage d’entrée. Utilisez y,tOut] = step(___,config)RespConfig pour créer config.
step(___) trace la réponse indicielle de sys avec les options de tracé par défaut pour toutes les combinaisons d’arguments d’entrée précédentes. Pour découvrir d’autres options de personnalisation du tracé, utilisez stepplot.
Pour regrouper les réponses de plusieurs systèmes dynamiques sur le même tracé, vous pouvez spécifier
syssous la forme d’une liste de modèles séparés par des virgules. Par exemple,step(sys1,sys2,sys3)regroupe les réponses de trois modèles sur le même tracé.Pour spécifier une couleur, un style de trait et un marqueur pour chaque système dans le tracé, spécifiez une valeur
LineSpecpour chaque système. Par exemple,step(sys1,LineSpec1,sys2,LineSpec2)trace deux modèles et spécifie leur style de tracé. Pour plus d'informations sur la spécification d’une valeurLineSpec, consultezstepplot.
Exemples
Tracez la réponse indicielle d’un système en temps continu représenté par la fonction de transfert suivante :
Pour cet exemple, créez un modèle tf qui représente la fonction de transfert. Vous pouvez également tracer la réponse indicielle d’autres types de modèles de systèmes dynamiques, tels que les modèles zéro-pôle-gain (zpk) ou de représentation d’état (ss).
sys = tf(4,[1 2 10]);
Tracez la réponse indicielle.
step(sys)
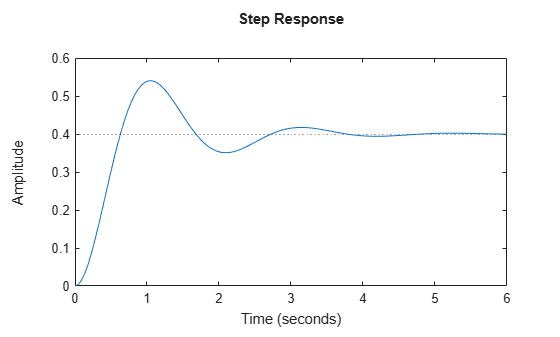
Le tracé step inclut automatiquement une ligne horizontale en pointillés qui indique la réponse d’état stationnaire. Dans une fenêtre figure MATLAB®, vous pouvez faire un clic droit sur le tracé pour voir d’autres caractéristiques de réponse indicielle telles que la réponse maximale et le temps de stabilisation. Pour plus d’informations sur ces caractéristiques, consultez stepinfo.
Tracez la réponse indicielle d’un système en temps discret. Le système possède un pas d’échantillonnage de 0,2 s et est représenté par les matrices de représentation d’état suivantes :
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;Créez le modèle de représentation d’état et tracez sa réponse indicielle.
sys = ss(A,B,C,D,0.2); step(sys)
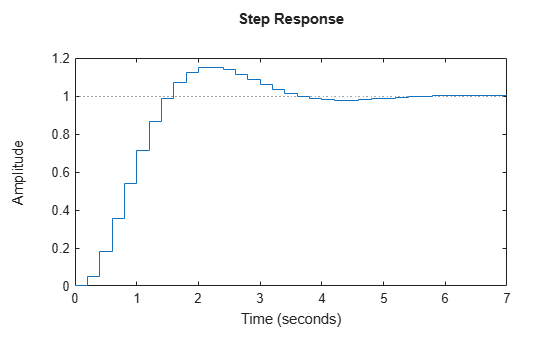
La réponse indicielle montre la discrétisation du modèle, en affichant la réponse calculée toutes les 0,2 seconde.
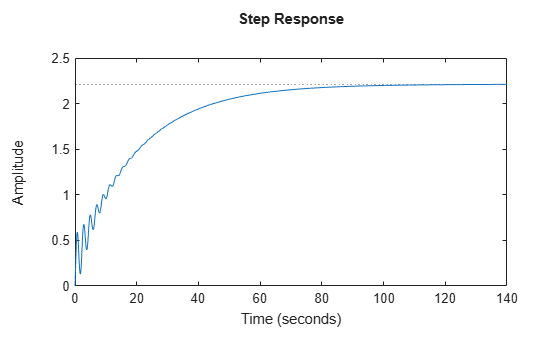
Examinez la réponse indicielle de la fonction de transfert suivante :
sys = zpk(-1,[-0.2+3j,-0.2-3j],1) * tf([1 1],[1 0.05])
sys =
(s+1)^2
----------------------------
(s+0.05) (s^2 + 0.4s + 9.04)
Continuous-time zero/pole/gain model.
Model Properties
step(sys)
Par défaut, step choisit un temps de fin qui montre l’état stable vers lequel la réponse s’oriente. Cependant, ce système possède des transitoires rapides, qui sont masqués sur cette échelle de temps. Pour observer de plus près la réponse transitoire, limitez le tracé indiciel à t = 15 s.
step(sys,15)
Vous pouvez également spécifier les temps exacts auxquels vous voulez examiner la réponse indicielle, à condition qu’ils soient séparés par un intervalle constant. Par exemple, examinez la réponse à partir de la fin du transitoire jusqu’à ce que le système atteigne l’état stable.
t = 20:0.2:120; step(sys,t)
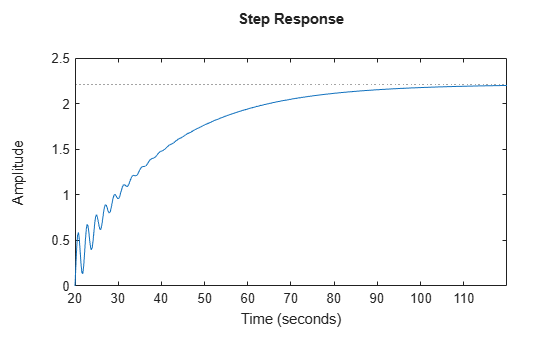
Même si ce tracé commence à t = 20, step applique toujours l’entrée indicielle à t = 0.
Considérons le modèle de représentation d’état de second ordre suivant :
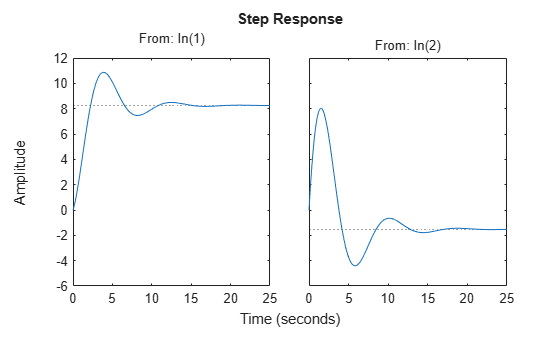
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
Ce modèle a deux entrées et une sortie, il a donc deux canaux : de la première entrée à la sortie et de la deuxième entrée à la sortie. Chaque canal a sa propre réponse indicielle.
Quand vous utilisez step, il calcule les réponses de tous les canaux.
step(sys)
Le tracé à gauche montre la réponse indicielle du premier canal d’entrée et le tracé à droite montre la réponse indicielle du deuxième canal d’entrée. Quand vous utilisez step pour tracer les réponses d’un modèle MIMO, il génère un tableau de tracés représentant tous les canaux E/S du modèle. Par exemple, créez un modèle de représentation d’état aléatoire composé de cinq états, trois entrées et deux sorties, et tracez sa réponse indicielle.
sys = rss(5,2,3); step(sys)
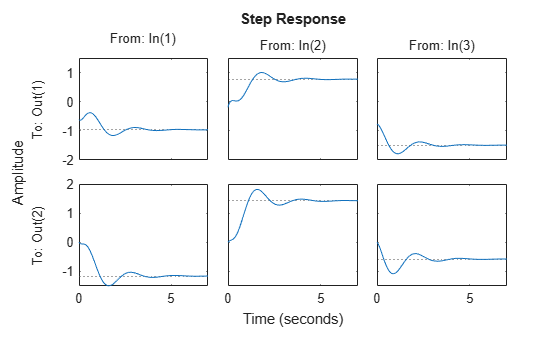
Dans une fenêtre figure MATLAB, vous pouvez restreindre le tracé à un sous-ensemble de canaux en faisant un clic droit sur le tracé et en sélectionnant I/O Selector (Sélecteur E/S).
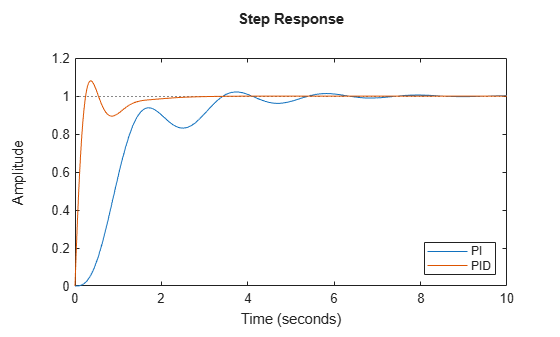
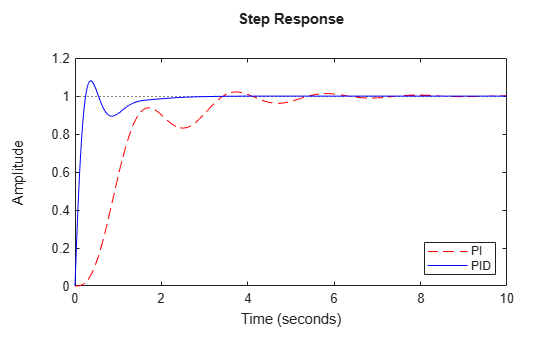
step vous permet de tracer les réponses de plusieurs systèmes dynamiques sur le même axe. Par exemple, comparez la réponse en boucle fermée d’un système avec un contrôleur PI et un contrôleur PID. Créez une fonction de transfert du système et réglez les contrôleurs.
H = tf(4,[1 2 10]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Formez les systèmes en boucle fermée et tracez leur réponse indicielle.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1); step(sys1,sys2) legend('PI','PID','Location','SouthEast')
Par défaut, step choisit des couleurs différentes pour chaque système que vous tracez. Vous pouvez spécifier des couleurs et des styles de ligne avec l’argument d’entrée LineSpec.
step(sys1,'r--',sys2,'b') legend('PI','PID','Location','SouthEast')
Le premier argument LineSpec 'r--' spécifie une ligne rouge en pointillés pour la réponse du contrôleur PI. Le deuxième argument LineSpec, 'b' spécifie une ligne bleue continue pour la réponse du contrôleur PID. La légende montre les couleurs et styles de ligne spécifiés. Pour découvrir d’autres options de personnalisation du tracé, utilisez stepplot.
L’exemple « Comparer les réponses de plusieurs systèmes » montre comment tracer les réponses de plusieurs systèmes individuels sur un axe unique. Quand il y a plusieurs systèmes dynamiques organisés dans un réseau de modèles, step trace toutes leurs réponses en même temps.
Créez un tableau de modèles. Pour cet exemple, utilisez un tableau unidimensionnel des fonctions de transfert de second ordre ayant différentes fréquences naturelles. D’abord, préallouez de la mémoire pour le tableau de modèles. La commande suivante crée une ligne de 1 par 5 de fonctions de transfert SISO de zéro gain. Les deux premières dimensions représentent les sorties et les entrées du modèle. Les autres dimensions sont les dimensions du tableau.
sys = tf(zeros(1,1,1,5));
Remplissez le tableau.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
(Pour plus d’informations sur les tableaux de modèles et comment les créer, consultez Model Arrays.) Tracez les réponses indicielles de tous les modèles du tableau.
step(sys)
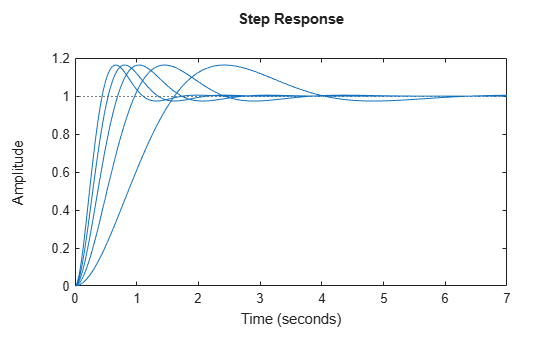
step utilise le même style de ligne pour les réponses de toutes les entrées du tableau. Une façon de distinguer les entrées entre elles est d’utiliser la propriété SamplingGrid des modèles de systèmes dynamiques pour associer chaque entrée du tableau à la valeur w0 correspondante.
sys.SamplingGrid = struct('frequency',w0);Désormais, quand vous tracez les réponses dans une fenêtre figure MATLAB, vous pouvez cliquer sur une trace pour voir la valeur de fréquence à laquelle elle correspond.
Quand vous lui donnez un argument de sortie, step renvoie un tableau de données de réponse. Pour un système SISO, les données de réponse sont renvoyées en tant que vecteur colonne de longueur égale au nombre de points temporels auxquels la réponse est échantillonnée. Vous pouvez fournir le vecteur t de points temporels ou vous pouvez permettre à step de sélectionner des points temporels à votre place sur la base de la dynamique du système. Par exemple, extrayez la réponse indicielle d’un système SISO à 101 points temporels entre t = 0 et t = 5 s.
sys = tf(4,[1 2 10]); t = 0:0.05:5; y = step(sys,t); size(y)
ans = 1×2
101 1
Pour un système MIMO, les données de réponse sont renvoyées en tant que tableau de dimensions N par Ny par Nu, où Ny et Nu sont le nombre de sorties et d’entrées du système dynamique. Par exemple, considérons le modèle de représentation d’état suivant, représentant un système à deux entrées et une sortie.
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
Extrayez la réponse indicielle de ce système à 200 points temporels entre t = 0 et t = 20 s.
t = linspace(0,20,200); y = step(sys,t); size(y)
ans = 1×3
200 1 2
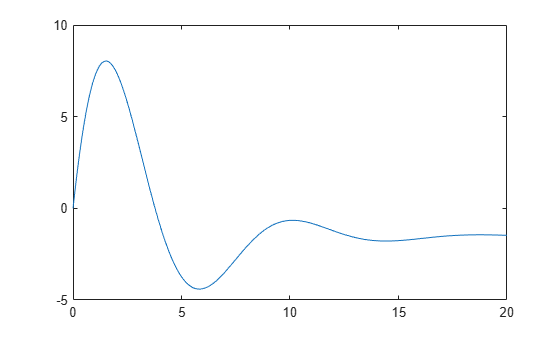
y(:,i,j) est un vecteur colonne qui contient la réponse indicielle de la je entrée à la ie sortie aux temps t. Par exemple, extrayez la réponse indicielle de la deuxième entrée à la sortie.
y12 = y(:,1,2); plot(t,y12)
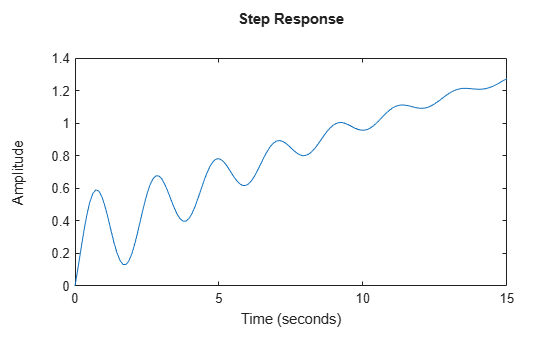
Créez une boucle de rétroaction avec retard et tracez sa réponse indicielle.
s = tf('s');
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s);
sys = feedback(ss(G),1);
step(sys)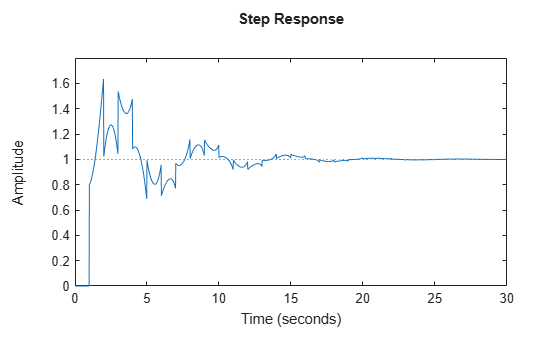
La réponse indicielle du système affichée est chaotique. La réponse indicielle de systèmes comportant des retards internes peut présenter un comportement étrange, comme des sauts récurrents. Un tel comportement est une caractéristique du système, pas une anomalie logicielle.
Par défaut, step applique un signal d’entrée qui passe de 0 à 1 à t = 0. Pour personnaliser l’amplitude et le biais, utilisez RespConfig. Par exemple, calculez la réponse d’un modèle de représentation d’état SISO à un signal qui passe de 1 à -1 à t = 0.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;
sys = ss(A,B,C,D,0.2);
opt = RespConfig;
opt.Bias = 1;
opt.Amplitude = -2;
step(sys,opt)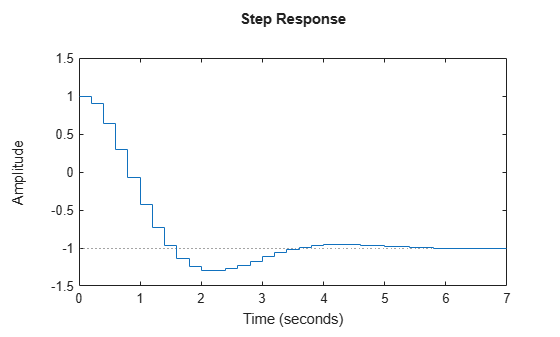
Pour les réponses aux signaux d’entrée arbitraires, utilisez lsim.
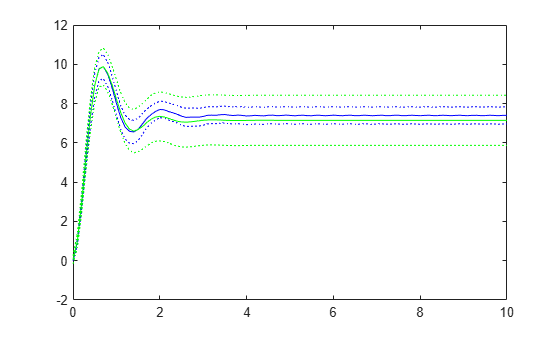
Comparez la réponse indicielle d’un modèle paramétrique identifié à celle d’un modèle (empirique) non paramétrique. Affichez également leurs 3 régions de confiance .
Chargez les données.
load iddata1 z1
Estimez un modèle paramétrique.
sys1 = ssest(z1,4);
Estimez un modèle non paramétrique.
sys2 = impulseest(z1);
Tracez les réponses indicielles afin de comparer.
t = (0:0.1:10)'; [y1, ~, ~, ysd1] = step(sys1,t); [y2, ~, ~, ysd2] = step(sys2,t); plot(t, y1, 'b', t, y1+3*ysd1, 'b:', t, y1-3*ysd1, 'b:') hold on plot(t, y2, 'g', t, y2+3*ysd2, 'g:', t, y2-3*ysd2, 'g:')
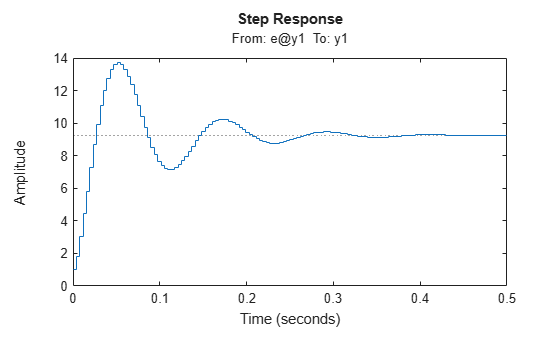
Calculez la réponse indicielle d’un modèle de séries temporelles identifié.
Un modèle de séries temporelles, également appelé modèle de signal, est un modèle sans signaux d’entrée mesurés. Le tracé indiciel de ce modèle utilise son canal de bruit (non mesuré) comme canal d’entrée auquel le signal indiciel est appliqué.
Chargez les données.
load iddata9;Estimez un modèle de séries temporelles.
sys = ar(z9, 4);
sys est un modèle du type A y(t) = e(t), où e(t) représente le canal de bruit. Pour le calcul de la réponse indicielle, e(t) est traité comme un canal d’entrée et est nommé e@y1.
Tracez la réponse indicielle.
step(sys)
Validez la linéarisation d’un modèle ARX non linéaire en comparant les réponses indicielles de faible amplitude des modèles linéaires et non linéaires.
Chargez les données.
load iddata2 z2;
Estimez un modèle ARX non linéaire.
nlsys = nlarx(z2,[4 3 10],idTreePartition,'custom',... {'sin(y1(t-2)*u1(t))+y1(t-2)*u1(t)+u1(t).*u1(t-13)',... 'y1(t-5)*y1(t-5)*y1(t-1)'},'nlr',[1:5, 7 9]);
Déterminez un point de fonctionnement d’équilibre pour nlsys correspondant à une valeur d’entrée d’état stationnaire de 1.
u0 = 1;
[X,~,r] = findop(nlsys, 'steady', 1);
y0 = r.SignalLevels.Output;Obtenez une approximation linéaire de nlsys à ce point de fonctionnement.
sys = linearize(nlsys,u0,X);
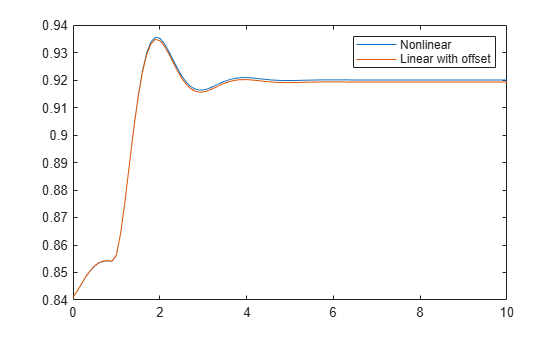
Validez l’utilité de sys en comparant sa réponse indicielle de faible amplitude à celle de nlsys.
Le système non linéaire nlsys fonctionne à un niveau d’équilibre dicté par (u0,y0). Introduisez une perturbation en échelon de taille 0,1 autour de cet état stationnaire et calculez la réponse correspondante.
opt = RespConfig; opt.InputOffset = u0; opt.Amplitude = 0.1; t = (0:0.1:10)'; ynl = step(nlsys, t, opt);
Le système linéaire sys exprime la relation entre les perturbations en entrée et la perturbation correspondante en sortie. Il n’a pas conscience des valeurs d’équilibre du système non linéaire.
Tracez la réponse indicielle du système linéaire.
opt = RespConfig; opt.Amplitude = 0.1; yl = step(sys, t, opt);
Ajoutez le décalage de l’état stationnaire, y0, à la réponse du système linéaire et tracez les réponses.
plot(t, ynl, t, yl+y0) legend('Nonlinear', 'Linear with offset')
Calculez et tracez la réponse indicielle d’un modèle (lpvss) LPV. Cet exemple simule la réponse indicielle en boucle fermée d’un modèle de balle en lévitation, défini dans fcnMaglev.m sur une perturbation .

Créez le modèle et discrétisez-le.
hmin = 0.05; hmax = 0.25; h0 = (hmin+hmax)/2; Ts = 0.01; Glpv = lpvss("h",@fcnMaglev,0,0,h0); Glpvd = c2d(Glpv,Ts,"tustin");
Échantillonnez le modèle LPV pour trois valeurs de hauteur et réglez un contrôleur PID.
hpid = linspace(hmin,hmax,3);
[Ga,Goffset] = sample(Glpvd,[],hpid);
wc = 50;
Ka = pidtune(Ga,"pidf",wc);
Ka.Tf = 0.01;Créez le contrôleur PID à gains séquencés.
Ka.SamplingGrid = struct("h",hpid); Koffset = struct("y",{Goffset.u}); Clpv = ssInterpolant(ss(Ka),Koffset);
Créez le modèle en boucle fermée.
CL = feedback(Glpvd*[1,Clpv],1,2,1);
CL.InputName = {'du';'href'};
CL.OutputName = "h";Faites de l’état stationnaire l’actuel pour = pour calculer une taille appropriée pour la perturbation en échelon à l’entrée du système physique.
[~,~,~,~,~,~,~,u0] = Glpv.DataFunction(0,h0);
Calculez et tracez la réponse à la perturbation d’entrée et au changement de pas pour référence. Définissez les signaux d’entrée de base = 0 et = pour spécifier la condition d’état stationnaire de départ.
t = 0:Ts:2; pFcn = @(k,x,u) x(1); Config = RespConfig( ... Bias=[0;h0], ... Amplitude=0.2*[u0;h0]*Ts, ... Delay=0.5, ... InitialParameter=h0); step(CL,t,pFcn,Config) title("Current Step Disturbance and Height Step Change")

Créez un modèle de représentation d’état à coefficients complexes.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
Calculez la réponse indicielle du système.
[y,t] = step(sys);
Les données de réponse obtenues contiennent des valeurs de sortie complexes.
y
Depuis R2026a
Cet exemple montre pourquoi une validation faisant varier le pas d’échantillonnage est nécessaire lors de la simulation de modèles avec des retards internes.
Chargez le modèle.
load idelayModel.mat
sys.InternalDelayans = 0.5166
Déterminez les marges de stabilité de sys. allmargin indique que la réponse en boucle fermée doit être instable.
s = allmargin(sys)
s = struct with fields:
GainMargin: [1.3867 0.9727 10.6798 20.1934 29.4912 38.7266 47.9352 57.1304 66.3172 75.4988 84.6770 93.8527 103.0266 112.1991 121.3705 130.5412 139.7111 148.8805 158.0495 167.2181 176.3864 185.5544 194.7221 203.8897 213.0571 222.2243 … ] (1×49 double)
GMFrequency: [0.0467 5.0880 15.2373 27.3818 39.5403 51.7014 63.8635 76.0266 88.1895 100.3526 112.5158 124.6791 136.8424 149.0058 161.1692 173.3326 185.4960 197.6594 209.8229 221.9864 234.1499 246.3134 258.4768 270.6404 282.8039 … ] (1×49 double)
PhaseMargin: [36.6926 -142.9664 113.4224 37.7140 -6.4674]
PMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
DelayMargin: [25.6083 13.0665 2.2403 0.1354 -0.0220]
DMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
Stable: 0
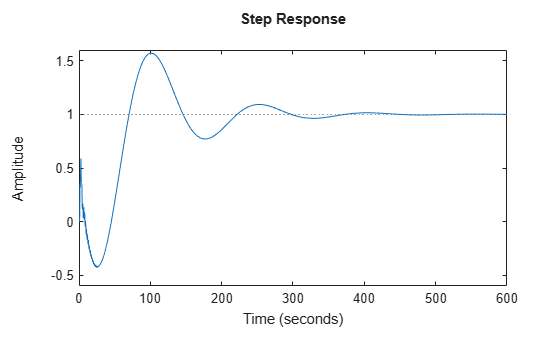
Lorsque vous simulez la réponse en boucle fermée avec la taille de pas par défaut, la réponse semble stable.
cl = feedback(sys,1); figure step(cl)
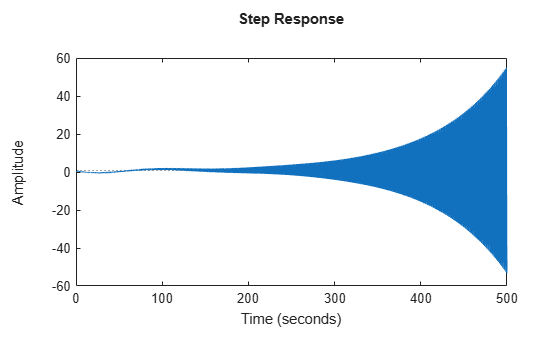
Toutefois, lorsque vous réduisez la taille de pas, la réponse s’avère instable.
figure step(cl,0:1e-2:500)
Pour déterminer si le pas de temps sélectionné est suffisamment petit, vous pouvez comparer la réponse en fréquence des modèles continu et discrétisé avec des tailles de pas variables.
sysd1_cl = c2d(cl,0.4,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
sysd2_cl = c2d(cl,0.01,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
figure bodeplot(cl,sysd1_cl,sysd2_cl) legend("Continuous","Discrete (Ts = 0.4)","Discrete (Ts = 0.01)")
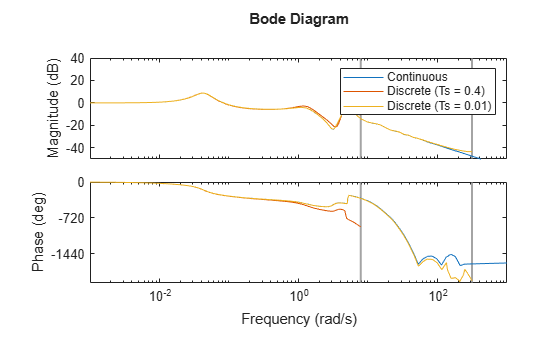
Un échantillonnage plus lent ne capture pas pleinement la résonance. La simulation de modèles avec des retards internes repose sur une discrétisation approximative. Vous devez donc vérifier si la taille de pas est suffisamment petite en comparant les réponses continues et discrètes dans le domaine fréquentiel.
Arguments d'entrée
Arguments en sortie
Conseils
Pour simuler les réponses du système aux signaux d’entrée arbitraires, utilisez
lsim.Lorsque vous avez besoin d’options supplémentaires de personnalisation du tracé, utilisez plutôt
stepplot.Les tracés créés à l’aide de
stepne supportent pas les titres ou étiquettes multilignes spécifiés en tant que tableaux de chaînes de caractères ou cell arrays de vecteurs de caractères. Pour spécifier des titres et étiquettes multilignes, utilisez une chaîne de caractères unique avec un caractèrenewline.step(sys,u,t) title("first line" + newline + "second line");
Algorithmes
Pour obtenir des échantillons de modèles en temps continu sans retards internes, step convertit ces modèles en modèles de représentation d’état et les discrétise au moyen d’un bloqueur d’ordre zéro sur les entrées. step choisit le pas d’échantillonnage pour cette discrétisation automatiquement, sur la base de la dynamique du système, sauf quand vous fournissez le vecteur temps d’entrée t sous la forme t = T0:dt:Tf. Dans ce cas, step utilise dt comme pas d’échantillonnage. Les pas de temps de simulation obtenus tOut sont échantillonnés uniformément avec l’espacement dt.
Pour les systèmes ayant des retards internes, la Control System Toolbox™ utilise des simulations basées sur une discrétisation c2d approximative. La précision de la simulation s’améliore à mesure que le pas d’échantillonnage diminue. Pour un exemple, voir Validate Simulation Results for Models with Internal Delays. (depuis R2026a)
Références
[1] L.F. Shampine and P. Gahinet, "Delay-differential-algebraic equations in control theory," Applied Numerical Mathematics, Vol. 56, Issues 3–4, pp. 574–588.