CIC Decimation
Decimate signal using cascaded integrator-comb filter
Libraries:
DSP System Toolbox /
Filtering /
Multirate Filters
DSP System Toolbox HDL Support /
Filtering
Description
The CIC Decimation block performs a sample rate decrease (decimation) on an input signal by an integer factor. Cascaded Integrator-Comb (CIC) filters are a class of linear phase FIR filters comprised of a comb part and an integrator part.
The block supports real and complex fixed-point inputs. In its normal mode of operation, the CIC Decimation block allows the adder’s numeric values to overflow and wrap around [1] [3]. The Fixed-Point infrastructure then causes overflow warnings to appear on the command line. This overflow is of no consequence.
The CIC Decimation block requires a Fixed-Point Designer™ license.
Examples

GSM Digital Down Converter in Simulink
Simulate steady-state behavior of a fixed-point digital down converter for GSM (Global System for Mobile) baseband conversions. The example model uses blocks from Simulink® and the DSP System Toolbox™ to emulate the operation of the TI GC4016 Quad Digital Down Converter (DDC).
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
More About
CIC filters are an optimized class of linear phase FIR filters composed of a comb part and an integrator part.
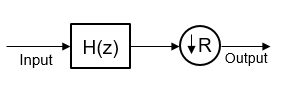
The CIC decimation filter is conceptually given by a single rate CIC filter, H(z) which is a lowpass anti-imaging filter, followed by a downsampler. The CIC decimation filter decreases the sample rate of an input signal by an integer factor using a cascaded integrator-comb (CIC) filter.
In a more efficient implementation, the single rate CIC filter H(z) is factorized this way:
where,
HI is the transfer function of the integrator part of the filter containing N stages of integrators.
HC is the transfer function of the N sections of the cascaded comb filters, each with a width of RM.
N is the number of sections. The number of sections in a CIC filter is defined as the number of sections in either the comb part or the integrator part of the filter. This value does not represent the total number of sections throughout the entire filter.
R is the decimation factor.
M is the differential delay.
In the overall multirate realization, the algorithm applies the noble identity for decimation and moves the rate change factor, R, to follow after the N sections of the cascaded integrators. The transfer function of the resulting filter is given by the following equation:
For a block diagram that shows the multirate implementation, see Algorithms.
Algorithms
The CIC decimation filter in More About is realized as a cascade of N sections of the integrators followed by a rate change factor of R, followed by N sections of comb filters.

This diagram shows two sections of cascaded integrators and two sections of cascaded comb filters. The unit delay in the integrator portion of the CIC filter can be located in either the feedforward or the feedback path. These two configurations yield identical filter frequency response. However, the numerical outputs from these two configurations are different due to the latency. This block puts the unit delay in the feedforward path of the integrator because it is a preferred configuration for HDL implementation.
References
[1] Hogenauer, E.B. “An Economical Class of Digital Filters for Decimation and Interpolation.” IEEE Transactions on Acoustics, Speech and Signal Processing. Vol. 29, Number 2, 1981, pp. 155–162.
[2] Meyer-Baese, U. Digital Signal Processing with Field Programmable Gate Arrays. New York: Springer Verlag, 2001.
[3] Harris, Fredric J., Multirate Signal Processing for Communication Systems. Upper Saddle River, NJ: Prentice Hall PTR, 2004.
Extended Capabilities
Version History
Introduced before R2006a
See Also
Functions
Objects
dsp.CICDecimator|dsp.CICInterpolator|dsp.FIRDecimator|dsp.FIRInterpolator|dsp.CICCompensationDecimator|dsp.CICCompensationInterpolator|dsp.FIRHalfbandDecimator|dsp.FIRHalfbandInterpolator