designHalfbandFIR
Description
B = designHalfbandFIRB is a vector of halfband FIR coefficients of length 25.
The System object™ argument is false by default. To implement the filter,
assign the filter coefficients in B to one of the supported System
objects.
B = designHalfbandFIR(Name=Value)
For example, B =
designHalfbandFIR(FilterOrder=30,TransitionWidth=0.2,DesignMethod="kaiser",SystemObject=true)SystemObject argument
is true, the function designs and implements the halfband FIR filter.
B is a dsp.FIRFilter
System object in this case.
When you specify only a partial list of filter parameters, the function designs the filter by setting the other design parameters to their default values.
When you specify any of the numeric input arguments in single precision, the function
designs the filter coefficients in single precision. Alternatively, you can use the Datatype and
like arguments to control the data type of the
coefficients. (since R2024b)
The function supports three design methods. Each design method supports a specific
set of design combinations. For more information, see DesignMethod.
This function supports code generation under certain conditions. For more information, see Code Generation.
Examples
Since R2024b
Use the designHalfbandFIR function to design a minimum-phase FIR halfband filter. Set PhaseConstraint to "minimum" and InputSampleRate to 1200 Hz.
minHalfband = designHalfbandFIR(FilterOrder=49,... PhaseConstraint='minimum',InputSampleRate=1200,... SystemObject=true,Verbose=true)
designHalfbandFIR(FilterOrder=49, TransitionWidth=60, DesignMethod="equiripple", Passband="lowpass", Structure="single-rate", InputSampleRate=1200, PhaseConstraint="minimum", Datatype="double", SystemObject=true)
minHalfband =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [0.0880 0.2902 0.4470 0.3323 4.6647e-04 -0.1975 -0.0760 0.1161 0.0842 -0.0719 -0.0773 0.0471 0.0676 -0.0327 -0.0580 0.0239 0.0494 -0.0184 -0.0419 0.0149 0.0354 -0.0125 -0.0297 0.0109 0.0247 -0.0097 -0.0203 0.0086 … ] (1×50 double)
InitialConditions: 0
Show all properties
Visualize the magnitude response of this filter using filterAnalyzer.
filterAnalyzer(minHalfband)

Set PhaseConstraint to 'maximum' to design a maximum-phase FIR halfband filter. With the same specifications, notice that the magnitude response of the minimum-phase and maximum-phase filters is identical.
maxHalfband = designHalfbandFIR(FilterOrder=49,... PhaseConstraint='maximum',InputSampleRate=1200,... SystemObject=true,Verbose=true)
designHalfbandFIR(FilterOrder=49, TransitionWidth=60, DesignMethod="equiripple", Passband="lowpass", Structure="single-rate", InputSampleRate=1200, PhaseConstraint="maximum", Datatype="double", SystemObject=true)
maxHalfband =
dsp.FIRFilter with properties:
Structure: 'Direct form'
NumeratorSource: 'Property'
Numerator: [7.4348e-04 -0.0024 0.0031 -6.5203e-04 -0.0024 0.0012 0.0027 -0.0019 -0.0033 0.0029 0.0040 -0.0041 -0.0047 0.0058 0.0055 -0.0079 -0.0062 0.0103 0.0070 -0.0132 -0.0078 0.0165 0.0086 -0.0203 -0.0097 0.0247 0.0109 … ] (1×50 double)
InitialConditions: 0
Show all properties
filterAnalyzer(minHalfband,maxHalfband)

Compare the phase response of the two filters.
filterAnalyzer(minHalfband,maxHalfband,Analysis="phase")
Compare the impulse response of the two filters. For the minimum-phase FIR filter, the energy of its impulse response is maximally concentrated towards the beginning of the impulse response, while the opposite is true for the maximum-phase filter.
filterAnalyzer(minHalfband,maxHalfband,Analysis="impulse")
Cascading the minimum- and maximum-phase filters yields a linear phase filter. The magnitude response of the filter cascade is the same as the individual filters but the phase response is linear.
cascFilter = cascade(minHalfband,maxHalfband)
cascFilter =
dsp.FilterCascade with properties:
Stage1: [1×1 dsp.FIRFilter]
Stage2: [1×1 dsp.FIRFilter]
CloneStages: true
filterAnalyzer(cascFilter,Analysis="magnitude",OverlayAnalysis="phase")

Design an equiripple FIR halfband filter with the order of 24 and a transition width of 0.1 using the designHalfbandFIR function. Assign the filter coefficients to a dsp.FIRFilter System object.
b = designHalfbandFIR(FilterOrder=24,DesignMethod="equiripple");
hbFIR = dsp.FIRFilter(b);Create a dsp.DynamicFilterVisualizer object and visualize the magnitude response of the filter.
dfv = dsp.DynamicFilterVisualizer(NormalizedFrequency=true); dfv(hbFIR);

Create a spectrumAnalyzer object to visualize the spectra of the input and output signals.
scope = spectrumAnalyzer(SampleRate=2, PlotAsTwoSidedSpectrum=false,... ChannelNames=["Input Signal","Filtered Signal"]);
Stream in random data and filter the signal using the FIR halfband filter.
for i = 1:1000 x = randn(1024, 1); y = hbFIR(x); scope(x,y); end

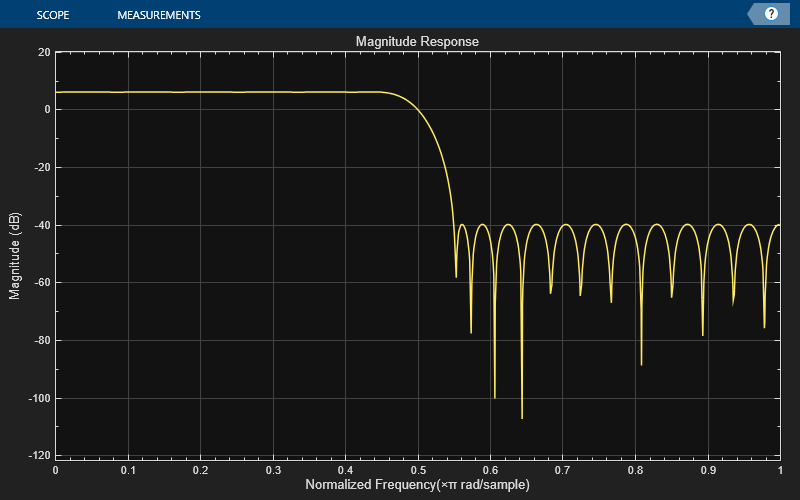
Design an equiripple FIR halfband interpolator object of order 48 using the designHalfbandFIR function. Set the Verbose argument to true.
hbFIR = designHalfbandFIR(FilterOrder=48,SystemObject=true,... Structure="interp",Verbose=true)
designHalfbandFIR(FilterOrder=48, TransitionWidth=0.1, DesignMethod="equiripple", Passband="lowpass", Structure="interp", InputSampleRate="normalized", PhaseConstraint="linear", Datatype="double", SystemObject=true)
hbFIR =
dsp.FIRHalfbandInterpolator with properties:
Specification: 'Coefficients'
Numerator: [0 -0.0082 0 0.0079 0 -0.0116 0 0.0165 0 -0.0227 0 0.0309 0 -0.0419 0 0.0571 0 -0.0800 0 0.1193 0 -0.2073 0 0.6350 1 0.6350 0 -0.2073 0 0.1193 0 -0.0800 0 0.0571 0 -0.0419 0 0.0309 0 -0.0227 0 0.0165 0 -0.0116 0 … ] (1×49 double)
FilterBankInputPort: false
Show all properties
Create a dsp.DynamicFilterVisualizer object and visualize the magnitude response of the filter.
dfv = dsp.DynamicFilterVisualizer(NormalizedFrequency=true); dfv(hbFIR);
The input is a cosine wave with an angular frequency of radians/sample.
input = cos(pi/4*(0:39)');
Interpolate the cosine signal using the FIR halfband interpolator.
output = hbFIR(input);
Plot the original and interpolated signals. In order to plot the two signals on the same plot, you must account for the output delay introduced by the FIR halfband interpolator and the scaling introduced by the filter. Use the outputDelay function to compute the delay value introduced by the interpolator. Shift the output by this delay value.
Visualize the input and the resampled signals. The input and output values coincide every other sample due to the interpolation factor of 2.
[delay,FsOut] = outputDelay(hbFIR,FsIn=1)
delay = 12
FsOut = 2
nInput = (0:length(input)-1); tOutput = (0:length(output)-1)/FsOut-delay; stem(tOutput,output,"filled",MarkerSize=4); hold on; stem(nInput,input); hold off; xlim([-5,20]) legend("Interpolated by 2","Input signal",Location="best");

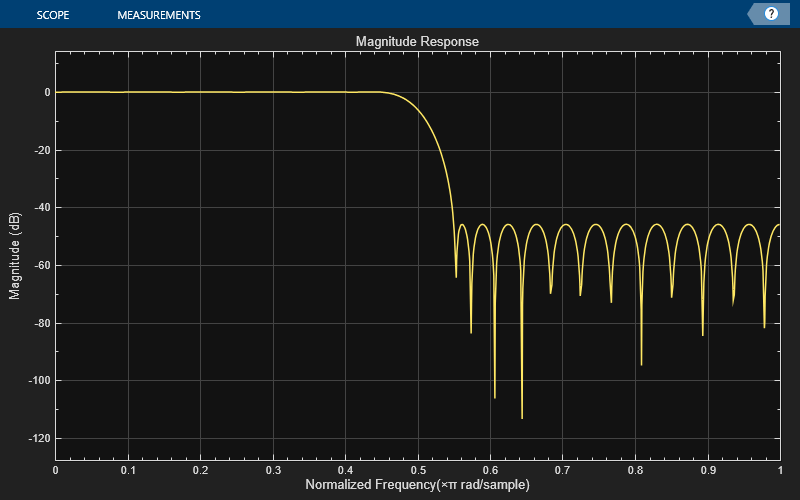
Design an equiripple FIR halfband decimator object of order 48 using the designHalfbandFIR function. Set the Verbose argument to true.
hbFIR = designHalfbandFIR(FilterOrder=48,SystemObject=true,... Structure="decim",Verbose=true)
designHalfbandFIR(FilterOrder=48, TransitionWidth=0.1, DesignMethod="equiripple", Passband="lowpass", Structure="decim", InputSampleRate="normalized", PhaseConstraint="linear", Datatype="double", SystemObject=true)
hbFIR =
dsp.FIRHalfbandDecimator with properties:
Main
Specification: 'Coefficients'
Numerator: [0 -0.0041 0 0.0040 0 -0.0058 0 0.0082 0 -0.0114 0 0.0155 0 -0.0209 0 0.0286 0 -0.0400 0 0.0597 0 -0.1037 0 0.3175 0.5000 0.3175 0 -0.1037 0 0.0597 0 -0.0400 0 0.0286 0 -0.0209 0 0.0155 0 -0.0114 0 0.0082 0 -0.0058 0 0.0040 0 -0.0041 0]
Show all properties
Create a dsp.DynamicFilterVisualizer object and visualize the magnitude response of the filter.
dfv = dsp.DynamicFilterVisualizer(NormalizedFrequency=true); dfv(hbFIR);
The input is a cosine wave with an angular frequency of radians/sample.
input = cos(pi/4*(0:39)');
Decimate the cosine signal using the FIR halfband decimator.
output = hbFIR(input);
Plot the original and decimated signals. In order to plot the two signals in the same plot, you must account for the output delay of the FIR halfband decimator and the scaling introduced by the filter. Use the outputDelay function to compute the delay introduced by the decimator. Shift the output by this delay value.
Visualize the input and the resampled signals. After a short transition, the output converges to a cosine of frequency , as expected, which is twice the frequency of the input signal, . Due to the decimation factor of 2, the output samples coincide with every other input sample.
[delay,FsOut] = outputDelay(hbFIR,FsIn=1)
delay = 24
FsOut = 0.5000
nInput = (0:length(input)-1); tOutput = (0:length(output)-1)/FsOut-delay; stem(tOutput,output,"filled",MarkerSize=4); hold on; stem(nInput,input); hold off; xlim([-10,15]) legend("Decimated by 2","Input signal","Location","best");

Name-Value Arguments
Output Arguments
More About
Algorithms
References
[1] Harris, F.J. Multirate Signal Processing for Communication Systems, Prentice Hall, 2004, pp. 208–209.
[2] Orfanidis, Sophocles J. Introduction to Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1996.
[3] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice Hall, 1999.
[4] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. Hoboken, NJ: John Wiley & Sons, 1987, pp. 54–83.
[5] Mitra, Sanjit Kumar, and James F. Kaiser, eds. Handbook for Digital Signal Processing. New York: Wiley, 1993.
Extended Capabilities
Version History
Introduced in R2023bSee Also
Functions
designHalfbandIIR|designLowpassFIR|designHighpassFIR|designMultirateFIR|designFracDelayFIR|outputDelay