simsmooth
State-space model simulation smoother
Description
X = simsmooth(Mdl,Y)X by applying a simulation
smoother to the time-invariant or time-varying state-space
model
Mdl and responses Y. simsmooth
uses forward filtering and back sampling to obtain one random path from the posterior
distribution of the states.
X = simsmooth(Mdl,Y,Name=Value)simsmooth(Mdl,Y,NumPaths=100) returns 100
independently generated paths of states.
Examples
Suppose that a latent process is an AR(1) model. The state equation is
where is Gaussian with mean 0 and standard deviation 1.
Generate a random series of 100 observations from , assuming that the series starts at 1.5.
T = 100; ARMdl = arima('AR',0.5,'Constant',0,'Variance',1); x0 = 1.5; rng(1); % For reproducibility x = simulate(ARMdl,T,'Y0',x0);
Suppose further that the latent process is subject to additive measurement error. The observation equation is
where is Gaussian with mean 0 and standard deviation 0.75. Together, the latent process and observation equations compose a state-space model.
Use the random latent state process (x) and the observation equation to generate observations.
y = x + 0.75*randn(T,1);
Specify the four coefficient matrices.
A = 0.5; B = 1; C = 1; D = 0.75;
Specify the state-space model using the coefficient matrices.
Mdl = ssm(A,B,C,D)
Mdl =
State-space model type: ssm
State vector length: 1
Observation vector length: 1
State disturbance vector length: 1
Observation innovation vector length: 1
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equation:
x1(t) = (0.50)x1(t-1) + u1(t)
Observation equation:
y1(t) = x1(t) + (0.75)e1(t)
Initial state distribution:
Initial state means
x1
0
Initial state covariance matrix
x1
x1 1.33
State types
x1
Stationary
Mdl is an ssm model. Verify that the model is correctly specified using the display in the Command Window. The software infers that the state process is stationary. Subsequently, the software sets the initial state mean and covariance to the mean and variance of the stationary distribution of an AR(1) model.
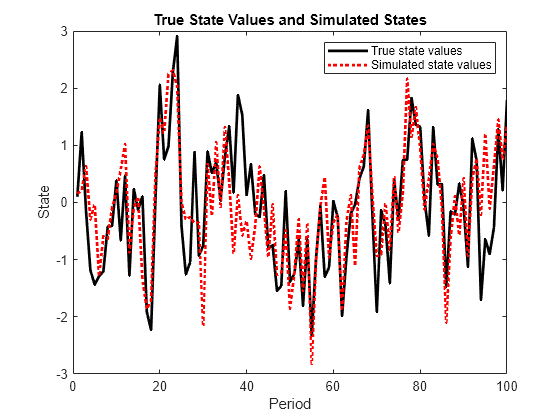
Simulate one path each of states and observations. Specify that the paths span 100 periods.
simX = simsmooth(Mdl,y);
simX is a 100-by-1 vector of simulated states.
Plot the true state values with the simulated states.
figure; plot(1:T,x,'-k',1:T,simX,':r','LineWidth',2); title 'True State Values and Simulated States'; xlabel 'Period'; ylabel 'State'; legend({'True state values','Simulated state values'});
By default, simulate simulates one path for each state in the state-space model. To conduct a Monte Carlo study, specify to simulate a large number of paths using the 'NumPaths' name-value pair argument.
The simsmooth function draws random samples from the distribution of smoothed states, or the distribution of a state given all of the data and parameters. This is the definition of posterior distribution of a state. Suppose that a latent process is an AR(1). The state equation is
where is Gaussian with mean 0 and standard deviation 1.
Generate a random series of 100 observations from , assuming that the series starts at 1.5.
T = 100; ARMdl = arima('AR',0.5,'Constant',0,'Variance',1); x0 = 1.5; rng(1); % For reproducibility x = simulate(ARMdl,T,'Y0',x0);
Suppose further that the latent process is subject to additive measurement error. The observation equation is
where is Gaussian with mean 0 and standard deviation 0.75. Together, the latent process and observation equations compose a state-space model.
Use the random latent state process (x) and the observation equation to generate observations.
y = x + 0.75*randn(T,1);
Specify the four coefficient matrices.
A = 0.5; B = 1; C = 1; D = 0.75;
Specify the state-space model using the coefficient matrices.
Mdl = ssm(A,B,C,D);
Smooth the states of the state space model.
xsmooth = smooth(Mdl,y);
Draw 1000 paths from the posterior distribution of .
N = 1000;
SimX = simsmooth(Mdl,y,'NumPaths',N);SimX is a 100-by- 1-by- 1000 array. Rows correspond to periods, columns correspond to individual states, and leaves correspond to separate paths.
Because SimX has a singleton dimension, collapse it so that its leaves correspond to the columns using squeeze.
SimX = squeeze(SimX);
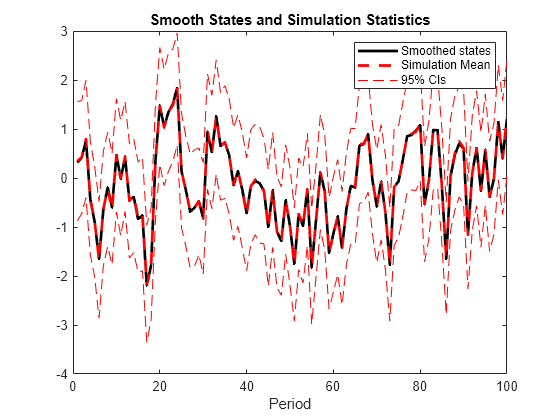
Compute the mean, standard deviation, and 95% confidence intervals of the state at each period.
xbar = mean(SimX,2); xstd = std(SimX,[],2); ci = [xbar - 1.96*xstd, xbar + 1.96*xstd];
Plot the smoothed states, and the means and 95% confidence intervals of the draws at each period.
figure; plot(xsmooth,'k','LineWidth',2); hold on; plot(xbar,'--r','LineWidth',2); plot(1:T,ci(:,1),'--r',1:T,ci(:,2),'--r'); legend('Smoothed states','Simulation Mean','95% CIs'); title('Smooth States and Simulation Statistics'); xlabel('Period')
Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
The Kalman filter accommodates missing data by not updating filtered state estimates corresponding to missing observations. In other words, suppose there is a missing observation at period t. Then, the state forecast for period t based on the previous t – 1 observations and filtered state for period t are equivalent.
For increased speed in simulating states, the simulation smoother implements minimal dimensionality error checking. Therefore, for models with unknown parameter values, you should ensure that the dimensions of the data and the dimensions of the coefficient matrices are consistent.
References
[1] Durbin J., and S. J. Koopman. “A Simple and Efficient Simulation Smoother for State Space Time Series Analysis.” Biometrika. Vol 89., No. 3, 2002, pp. 603–615.
Version History
Introduced in R2014b