greyest
Estimate ODE parameters of linear grey-box model
Description
Examples
Estimate the parameters of a DC motor using the linear grey-box framework.
Load the measured data.
load('dcmotordata'); data = iddata(y, u, 0.1, 'Name', 'DC-motor'); data.InputName = 'Voltage'; data.InputUnit = 'V'; data.OutputName = {'Angular position', 'Angular velocity'}; data.OutputUnit = {'rad', 'rad/s'}; data.Tstart = 0; data.TimeUnit = 's';
data is an iddata object containing the measured data for the outputs, the angular position, the angular velocity. It also contains the input, the driving voltage.
Create a grey-box model representing the system dynamics.
For the DC motor, choose the angular position (rad) and the angular velocity (rad/s) as the outputs and the driving voltage (V) as the input. Set up a linear state-space structure of the following form:
is the time constant of the motor in seconds, and is the static gain from the input to the angular velocity in rad/(V*s).
G = 0.25; tau = 1; init_sys = idgrey('motorDynamics',tau,'cd',G,0);
The governing equations in state-space form are represented in the MATLAB® file motorDynamics.m. To view the contents of this file, enter edit motorDynamics.m at the MATLAB command prompt.
is a known quantity that is provided to motorDynamics.m as an optional argument.
is a free estimation parameter.
init_sys is an idgrey model associated with motor.m.
Estimate .
sys = greyest(data,init_sys);
sys is an idgrey model containing the estimated value of .
To obtain the estimated parameter values associated with sys, use getpvec(sys).
Analyze the result.
opt = compareOptions('InitialCondition','zero'); compare(data,sys,Inf,opt)
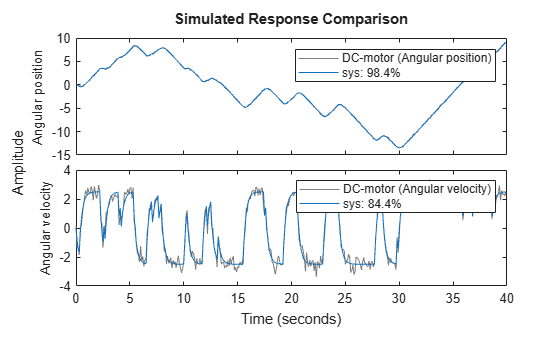
sys provides a 98.35% fit for the angular position and an 84.42% fit for the angular velocity.
Estimate the parameters of a DC motor by incorporating prior information about the parameters when using regularization constants.
The model is parameterized by static gain G and time constant . From prior knowledge, it is known that G is about 4 and is about 1. Also, you have more confidence in the value of than G and would like to guide the estimation to remain close to the initial guess.
Load estimation data.
load regularizationExampleData.mat motorData
The data contains measurements of motor's angular position and velocity at given input voltages.
Create an idgrey model for DC motor dynamics. Use the function DCMotorODE that represents the structure of the grey-box model.
mi = idgrey(@DCMotorODE,{'G', 4; 'Tau', 1},'cd',{}, 0);
mi = setpar(mi, 'label', 'default');If you want to view the DCMotorODE function, type:
type DCMotorODE.mfunction [A,B,C,D] = DCMotorODE(G,Tau,Ts) %DCMOTORODE ODE file representing the dynamics of a DC motor parameterized %by gain G and time constant Tau. % % [A,B,C,D,K,X0] = DCMOTORODE(G,Tau,Ts) returns the state space matrices % of the DC-motor with time-constant Tau and static gain G. The sample % time is Ts. % % This file returns continuous-time representation if input argument Ts % is zero. If Ts>0, a discrete-time representation is returned. % % See also IDGREY, GREYEST. % Copyright 2013 The MathWorks, Inc. A = [0 1;0 -1/Tau]; B = [0; G/Tau]; C = eye(2); D = [0;0]; if Ts>0 % Sample the model with sample time Ts s = expm([[A B]*Ts; zeros(1,3)]); A = s(1:2,1:2); B = s(1:2,3); end
Specify regularization options Lambda.
opt = greyestOptions; opt.Regularization.Lambda = 100;
Specify regularization options R.
opt.Regularization.R = [1, 1000];
You specify more weighting on the second parameter because you have more confidence in the value of than G.
Specify the initial values of the parameters as regularization option *.
opt.Regularization.Nominal = 'model';Estimate the regularized grey-box model.
sys = greyest(motorData, mi, opt);