frd
Frequency-response data model
Description
Use frd to create real-valued or complex-valued
frequency-response data models, or to convert dynamic system models to frequency-response data model
form.
Frequency-response data models store complex frequency response data with corresponding
frequency points. For example, a frequency-response data model H(jwi), stores the frequency response at each input frequency
wi, where i = 1,…,n. The frd model object can represent SISO or MIMO
frequency-response data models in continuous time or discrete time. For more information, see
Frequency Response Data (FRD) Models.
You can also use frd to create generalized frequency-response data
(genfrd) models.
Creation
You can obtain frd models in one of the following ways.
Create the model from frequency response data using the
frdcommand. For example, you can create anfrdmodel with frequency response data taken at specific frequencies.For an example, see SISO Frequency-Response Data Model.
Convert a linear model such as an
ssmodel into anfrdmodel by computing the frequency response of the model at specified frequencies.For an example, see Convert State-Space Model to Frequency-Response Data Model.
Estimate the model using offline frequency response estimation workflows. These workflows require Simulink® Control Design™ software.
For more information, see Estimate Frequency Response at the Command Line (Simulink Control Design) and Estimate Frequency Response Using Model Linearizer (Simulink Control Design).
Syntax
Description
sys = frd(___,Name,Value)
sys = frd(ltiSys,frequency,FrequencyUnits)FrequencyUnit.
Input Arguments
Properties
Object Functions
The following lists contain a representative subset of the functions you can use with
frd models. In general, many functions applicable to Dynamic System Models are also
applicable to a frd object. frd models do not work with
any time-domain analysis functions.
Examples
Create an frd object from frequency response data.
For this example, load the frequency response data collected for a water tank model.
load wtankData.matThis data contains the frequency response data collected for the frequency range rad/s to rad/s.
Create the model.
sys = frd(response,frequency)
sys =
Frequency(rad/s) Response
---------------- --------
0.0010 1.562e+01 - 1.9904i
0.0018 1.560e+01 - 2.0947i
0.0034 1.513e+01 - 3.3670i
0.0062 1.373e+01 - 5.4306i
0.0113 1.047e+01 - 7.5227i
0.0207 5.829e+00 - 7.6529i
0.0379 2.340e+00 - 5.6271i
0.0695 7.765e-01 - 3.4188i
0.1274 2.394e-01 - 1.9295i
0.2336 7.216e-02 - 1.0648i
0.4281 2.157e-02 - 0.5834i
0.7848 6.433e-03 - 0.3188i
1.4384 1.916e-03 - 0.1740i
2.6367 5.705e-04 - 0.0950i
4.8329 1.698e-04 - 0.0518i
8.8587 5.055e-05 - 0.0283i
16.2378 1.505e-05 - 0.0154i
29.7635 4.478e-06 - 0.0084i
54.5559 1.333e-06 - 0.0046i
100.0000 3.967e-07 - 0.0025i
Continuous-time frequency response.
Model Properties
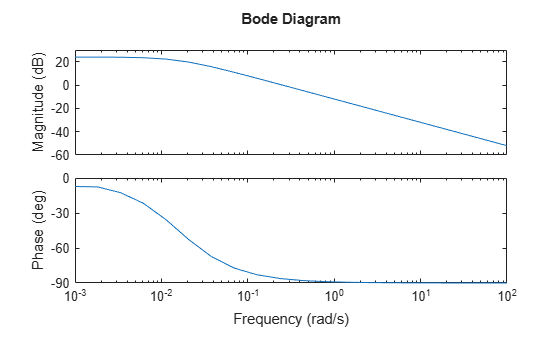
Plot sys.
bode(sys)
For this example, consider randomly generated response data and frequencies.
Generate a 3-by-2-by-7 complex array and a frequency vector with seven points between 0.01 and 100 rad/s. Set the sample time Ts to 5 seconds.
rng(0) r = randn(3,2,7)+1i*randn(3,2,7); w = logspace(-2,2,7); Ts = 5;
Create the model.
sys = frd(r,w,Ts)
sys =
From input 1 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.5377 + 0.3192i 1.8339 + 0.3129i -2.2588 - 0.8649i
0.0464 -0.4336 + 1.0933i 0.3426 + 1.1093i 3.5784 - 0.8637i
0.2154 0.7254 - 0.0068i -0.0631 + 1.5326i 0.7147 - 0.7697i
1.0000 1.4090 - 1.0891i 1.4172 + 0.0326i 0.6715 + 0.5525i
4.6416 0.4889 - 1.4916i 1.0347 - 0.7423i 0.7269 - 1.0616i
21.5443 0.8884 - 0.1924i -1.1471 + 0.8886i -1.0689 - 0.7648i
100.0000 0.3252 - 0.1774i -0.7549 - 0.1961i 1.3703 + 1.4193i
From input 2 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.8622 - 0.0301i 0.3188 - 0.1649i -1.3077 + 0.6277i
0.0464 2.7694 + 0.0774i -1.3499 - 1.2141i 3.0349 - 1.1135i
0.2154 -0.2050 + 0.3714i -0.1241 - 0.2256i 1.4897 + 1.1174i
1.0000 -1.2075 + 1.1006i 0.7172 + 1.5442i 1.6302 + 0.0859i
4.6416 -0.3034 + 2.3505i 0.2939 - 0.6156i -0.7873 + 0.7481i
21.5443 -0.8095 - 1.4023i -2.9443 - 1.4224i 1.4384 + 0.4882i
100.0000 -1.7115 + 0.2916i -0.1022 + 0.1978i -0.2414 + 1.5877i
Sample time: 5 seconds
Discrete-time frequency response.
Model Properties
The specified data results in a two-input, three-output frd model.
For this example, create a frequency-response data model with properties inherited from a transfer function model.
Create a transfer function sys1 with the TimeUnit property set to 'minutes' and InputDelay property set to 3.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputDelay',3)
sys1 =
2 s
exp(-3*s) * ---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = {sys1.TimeUnit,sys1.InputDelay}propValues1=1×2 cell array
{'minutes'} {[3]}
Create an frd model with properties inherited from sys1.
rng(0) response = randn(1,1,7)+1i*randn(1,1,7); w = logspace(-2,2,7); sys2 = frd(response,w,sys1)
sys2 =
Frequency(rad/minute) Response
--------------------- --------
0.0100 0.5377 + 0.3426i
0.0464 1.8339 + 3.5784i
0.2154 -2.2588 + 2.7694i
1.0000 0.8622 - 1.3499i
4.6416 0.3188 + 3.0349i
21.5443 -1.3077 + 0.7254i
100.0000 -0.4336 - 0.0631i
Input delays (minutes): 3
Continuous-time frequency response.
Model Properties
propValues2 = {sys2.TimeUnit,sys2.InputDelay}propValues2=1×2 cell array
{'minutes'} {[3]}
Observe that the frd model sys2 has that same properties as sys1.
For this example, load the frequency response data collected for a water tank model.
load wtankData.matThe model has one input, Voltage, and one output, Water height.
Create an frd model, specifying the input and output names.
sys = frd(response,frequency,'InputName','Voltage','OutputName','Height');
Plot the frequency response.
bode(sys)
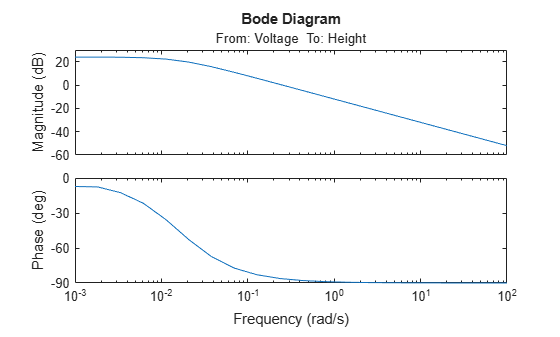
The input and output names appear on the Bode plot. Naming the inputs and outputs can be useful when dealing with response plots for MIMO systems.
For this example, compute the frd model of the following state-space model:
Create a state-space model using the state-space matrices.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Convert the state-space model ltiSys to a frd model for frequencies between 0.01 and 100 rad/s.
w = logspace(-2,2,50); sys = frd(ltiSys,w);
Compare the frequency responses.
bode(ltiSys,'b',sys,'r--')
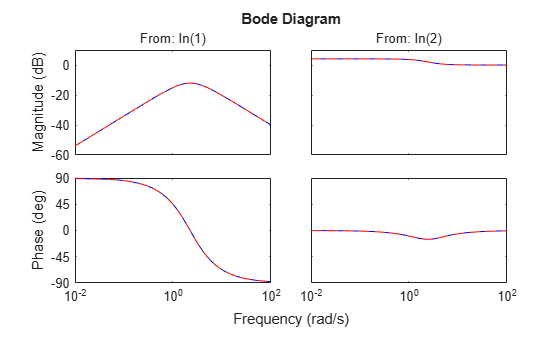
The responses are identical.
To create arrays of frd models, you can specify a multidimensional array of frequency response data.
For instance, when you specify the response data as a numeric array of size [NY NU NF S1 ... Sn], the function returns a S1-by-...-by-Sn array of frd models. Each of these models has NY outputs, NU inputs, and NF frequency points.
Generate a 2-by-3 array of random response data with one-output, two-input models at 10 frequency points between 0.1 and 10 rad/s.
w = logspace(-1,1,10); r = randn(1,2,10,2,3)+1i*randn(1,2,10,2,3); sys = frd(r,w);
Extract the model at the index (2,1) from the model array.
sys21 = sys(:,:,2,1)
sys21 =
From input 1 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 0.6715 + 0.0229i
0.1668 0.7172 - 1.7502i
0.2783 0.4889 - 0.8314i
0.4642 0.7269 - 1.1564i
0.7743 0.2939 - 2.0026i
1.2915 0.8884 + 0.5201i
2.1544 -1.0689 - 0.0348i
3.5938 -2.9443 + 1.0187i
5.9948 0.3252 - 0.7145i
10.0000 1.3703 - 0.2248i
From input 2 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 -1.2075 - 0.2620i
0.1668 1.6302 - 0.2857i
0.2783 1.0347 - 0.9792i
0.4642 -0.3034 - 0.5336i
0.7743 -0.7873 + 0.9642i
1.2915 -1.1471 - 0.0200i
2.1544 -0.8095 - 0.7982i
3.5938 1.4384 - 0.1332i
5.9948 -0.7549 + 1.3514i
10.0000 -1.7115 - 0.5890i
Continuous-time frequency response.
Model Properties
You can specify negative frequency values in an frd object. This capability is useful when you want to capture the frequency response data of models with complex coefficients.
Create a frequency vector with both positive and negative values.
w0 = sort([-logspace(-2,2,50) 0 logspace(-2,2,50)]);
Create a state-space model with complex coefficients.
A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D);
Convert the model to an frd model at the specified frequencies.
sys = frd(Gc,w0);
Plot the frequency response of the models.
bode(Gc,'b',sys,'r--')
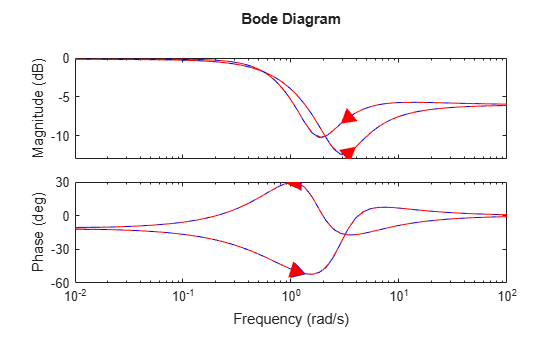
The plot responses match closely. The plot shows two branches for models with complex coefficients, one for positive frequencies, with a right-pointing arrow, and one for negative frequencies, with a left-pointing arrow. In both branches, the arrows indicate the direction of increasing frequencies.
Version History
Introduced before R2006a