pzmap
Carte des zéros et des pôles d’un système dynamique
Syntaxe
Description
[ renvoie les pôles et les zéros de transmission du système du modèle de système dynamique p,z] = pzmap(sys)sys.
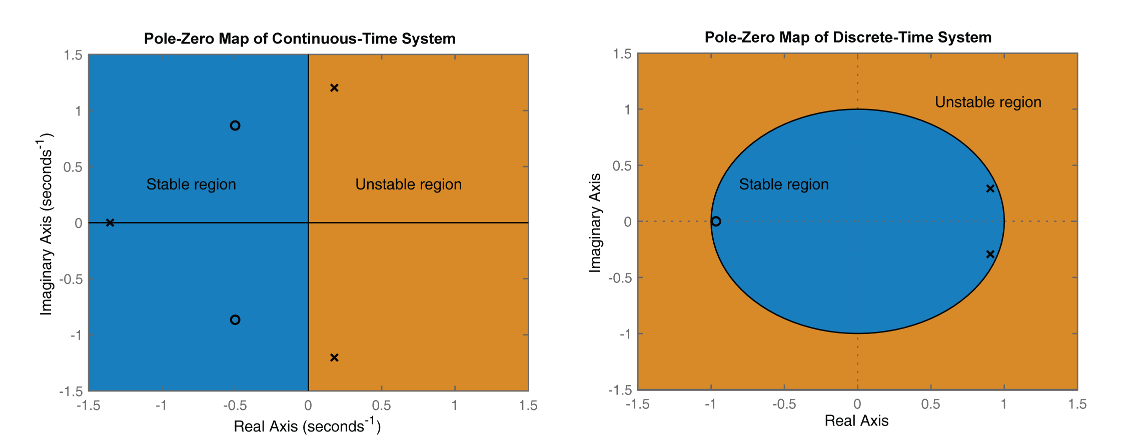
La figure suivante montre les cartes des zéros et des pôles pour un modèle variant dans le temps linéaire, en temps continu (à gauche) et en temps discret (à droite).
Dans les systèmes en temps continu, tous les pôles sur le plan complexe s doivent se situer sur le demi-plan gauche (zone bleue) pour garantir la stabilité. Le système est marginalement stable si des pôles distincts se situent sur l’axe imaginaire, c’est-à-dire si les parties réelles des pôles sont zéro.
Dans les systèmes en temps discret, tous les pôles sur le plan complexe z doivent se situer à l’intérieur du cercle unitaire (zone bleue). Le système est marginalement stable si l’un ou plusieurs de ses pôles se situent sur le cercle unitaire.
pzmap( trace une carte des zéros et des pôles pour sys)sys. Dans le tracé, x et o représentent respectivement des pôles et des zéros. Pour les systèmes SISO, pzmap trace les pôles et les zéros du système. Pour les systèmes MIMO, pzmap trace les pôles et les zéros de transmission du système.
Exemples
Tracez les pôles et les zéros du système en temps continu, représenté par la fonction de transfert suivante :
H = tf([2 5 1],[1 3 5]);
pzmap(H)
grid on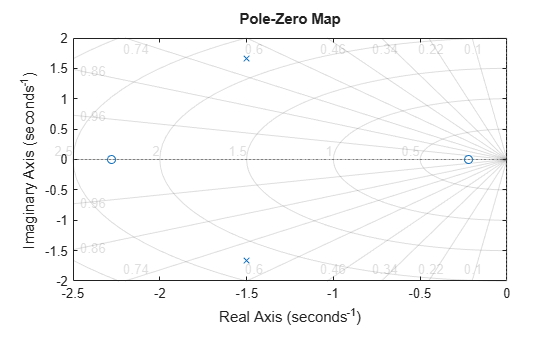
Activer la grille affiche des lignes d’amortissement constant (zêta) et des lignes de fréquence naturelle constante (wn). Ce système a deux zéros réels, marqués d’un o sur le tracé. Le système a également une paire de pôles complexes, marqués d’un x.
Tracez la carte des zéros et des pôles d’un modèle (idss) de représentation d’état identifié en temps discret. En pratique, vous pouvez obtenir un modèle idss par estimation sur la base des mesures d’entrée-sortie d’un système. Pour cet exemple, créez-en un à partir de données de représentation d’état.
A = [0.1 0; 0.2 -0.9];
B = [.1 ; 0.1];
C = [10 5];
D = [0];
sys = idss(A,B,C,D,'Ts',0.1);Examinez la carte des zéros et des pôles.
pzmap(sys)
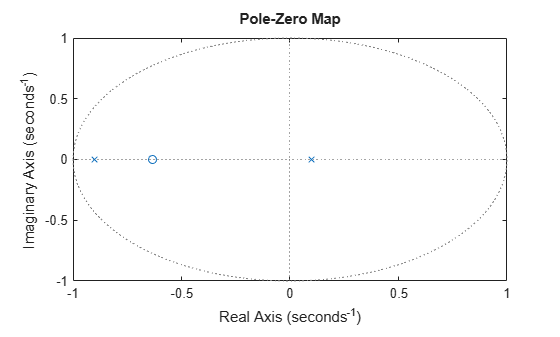
Les pôles de système sont marqués d’un x et les zéros sont marqués d’un o.
Pour cet exemple, chargez un tableau de 3 par 1 de modèles de fonction de transfert.
load("tfArray.mat","sys"); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Tracez les pôles et les zéros de chaque modèle du tableau dans des couleurs différentes. Pour cet exemple, utilisez le rouge pour le premier modèle, le vert pour le deuxième et le bleu pour le troisième modèle du tableau.
pzplot(sys(:,:,1),"r",sys(:,:,2),"g",sys(:,:,3),"b") grid

La grille montre des lignes d’amortissement constant et de fréquence naturelle sur le plan s du tracé des pôles et des zéros.
Utilisez pzmap pour calculer les pôles et les zéros de la fonction de transfert suivante :
sys = tf([4.2,0.25,-0.004],[1,9.6,17]); [p,z] = pzmap(sys)
p = 2×1
-7.2576
-2.3424
z = 2×1
-0.0726
0.0131
Cet exemple utilise un modèle de bâtiment de huit étages, chacun avec trois degrés de liberté : deux déplacements et une rotation. La relation E/S pour n’importe lequel de ces déplacements est représentée sous la forme d’un modèle à 48 états, où chaque état représente un déplacement ou son taux de variation (vitesse).
Chargez le modèle de bâtiment.
load('building.mat');
size(G)State-space model with 1 outputs, 1 inputs, and 48 states.
Tracez les pôles et les zéros du système.
pzmap(G)
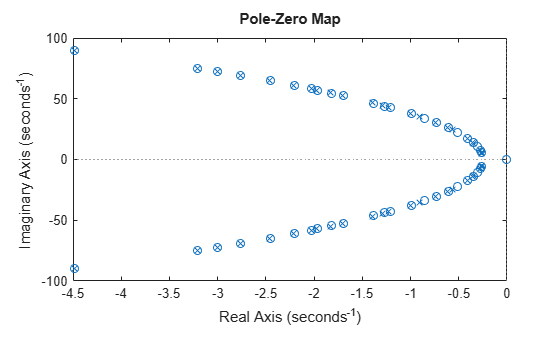
Grâce au tracé, observez qu’il y a de nombreuses paires pôle-zéro proches de l’annulation qui pourraient potentiellement être éliminées pour simplifier le modèle, sans effet sur la réponse globale du modèle. pzmap est utile pour identifier visuellement ces paires pôle-zéro proches de l’annulation pour effectuer une simplification des pôles et des zéros.
Arguments d'entrée
Arguments en sortie
Conseils
Pour les modèles MIMO,
pzmapaffiche tous les pôles et les zéros de transmission du système sur un seul tracé. Pour établir une correspondance entre les pôles et les zéros pour des paires d’entrée-sortie individuelles, utiliseziopzmap.Pour des options supplémentaires permettant de personnaliser l'apparence du tracé des pôles et des zéros, utilisez
pzplot.Les tracés créés à l’aide de
pzmapne supportent pas les titres ou étiquettes multilignes spécifiés en tant que tableaux de chaînes de caractères ou cell arrays de vecteurs de caractères. Pour spécifier des titres et étiquettes multilignes, utilisez une chaîne de caractères unique avec un caractèrenewline.pzmap(sys,u,t) title("first line" + newline + "second line");