tf
Modèle de fonction de transfert
Description
Utilisez tf pour créer des modèles de fonction de transfert à valeurs réelles ou complexes, ou pour convertir des modèles de systèmes dynamiques en modèles de fonction de transfert.
Les fonctions de transfert sont une représentation du domaine fréquentiel des systèmes linéaires invariants dans le temps. Par exemple, considérons un système dynamique SISO en temps continu représenté par la fonction de transfert sys(s) = N(s)/D(s), où s = jw, N(s) et D(s) sont appelés respectivement les polynômes numérateur et dénominateur. L’objet de modèle tf peut représenter des fonctions de transfert SISO ou MIMO en temps continu ou discret.
Vous pouvez créer un objet de modèle de fonction de transfert en spécifiant directement ses coefficients ou en convertissant un modèle d’un autre type (tel qu’un modèle de représentation d’état ss) en modèle de fonction de transfert. Pour plus d’informations, consultez Fonctions de transfert.
Vous pouvez également utiliser tf pour créer des modèles de représentation d’état généralisés (genss) ou incertains (uss (Robust Control Toolbox)).
Création
Syntaxe
Description
Créer un modèle de fonction de transfert
sys = tf(numerator,denominator)Numerator et Denominator. Par exemple, considérons un système dynamique SISO en temps continu représenté par la fonction de transfert sys(s) = N(s)/D(s). Les arguments en entrée numerator et denominator sont respectivement les coefficients de N(s) et D(s).
sys = tf(numerator,denominator,ts)Numerator, Denominator et Ts. Par exemple, considérons un système dynamique SISO en temps discret représenté par la fonction de transfert sys(z) = N(z)/D(z). Les arguments en entrée numerator et denominator sont respectivement les coefficients de N(z) et D(z). Pour ne pas spécifier le pas d’échantillonnage, définissez l’argument ts en entrée à -1.
sys = tf(numerator,denominator,ltiSys)ltiSys, y compris le pas d’échantillonnage.
sys = tf(___,PropertyName=Value)
Convertir en modèle de fonction de transfert
sys = tf(ltiSys,Name=Value)ltiSys en calculant les zéros et les pôles sur la base d’un ou plusieurs arguments nom-valeur spécifiés. Puisque cette méthode calcule les zéros pour chaque paire d’entrée-sortie, elle convient mieux aux modèles ayant de petites tailles d’entrées-sorties. (depuis R2025a)
Créer une variable pour une expression rationnelle
s = tf('s') crée une variable spéciale s que vous pouvez utiliser dans une expression rationnelle pour créer un modèle de fonction de transfert en temps continu. Il est parfois plus aisé et plus intuitif de recourir à une expression rationnelle plutôt que de spécifier des coefficients polynomiaux.
Arguments en entrée
Arguments nom-valeur
Arguments en sortie
Propriétés
Fonctions d'objet
Les listes suivantes contiennent un sous-ensemble représentatif des fonctions que vous pouvez utiliser avec les modèles tf. En règle générale, toute fonction applicable à Modèles de systèmes dynamiques est applicable à un objet tf.
Exemples
Pour cet exemple, considérons le modèle de fonction de transfert SISO suivant :
Spécifiez les coefficients du numérateur et du dénominateur classés dans l’ordre des puissances décroissantes de s, et créez le modèle de fonction de transfert.
numerator = 1; denominator = [2,3,4]; sys = tf(numerator,denominator)
sys =
1
---------------
2 s^2 + 3 s + 4
Continuous-time transfer function.
Model Properties
Pour cet exemple, considérons le modèle de fonction de transfert SISO en temps discret suivant :
Spécifiez les coefficients du numérateur et du dénominateur classés dans l’ordre des puissances décroissantes de z, et un pas d’échantillonnage de 0,1 s. Créez le modèle de fonction de transfert en temps discret.
numerator = [2,0]; denominator = [4,0,3,-1]; ts = 0.1; sys = tf(numerator,denominator,ts)
sys =
2 z
---------------
4 z^3 + 3 z - 1
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Pour cet exemple, considérons un modèle de fonction de transfert qui représente un système de deuxième ordre avec la fréquence naturelle et l’amortissement connus.
Voici la fonction de transfert d’un système de deuxième ordre, exprimée en fonction de son amortissement et de la fréquence naturelle :
Sur la base d'un amortissement = 0,25 et d’une fréquence naturelle = 3 rad/s, créez la fonction de transfert de deuxième ordre.
zeta = 0.25; w0 = 3; numerator = w0^2; denominator = [1,2*zeta*w0,w0^2]; sys = tf(numerator,denominator)
sys =
9
---------------
s^2 + 1.5 s + 9
Continuous-time transfer function.
Model Properties
Examinez la réponse de cette fonction de transfert à une entrée indicielle.
stepplot(sys)
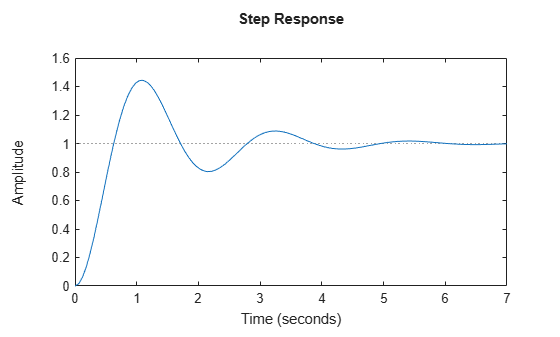
Le tracé indique l’appel en aval attendu d’un système de deuxième ordre avec un faible amortissement.
Créez une fonction de transfert pour le modèle MIMO en temps discret :
avec un pas d’échantillonnage de ts = 0.2 secondes.
Spécifiez les coefficients du numérateur sous la forme d’une matrice 2 par 2.
numerators = {1 [1 0];[-1 2] 3};Spécifiez les coefficients du dénominateur commun en tant que vecteur ligne.
denominator = [1 0.3];
Créez le modèle de fonction de transfert MIMO en temps discret.
ts = 0.2; sys = tf(numerators,denominator,ts)
sys =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Pour plus d'informations sur la création de fonctions de transfert MIMO, voir Fonctions de transfert MIMO.
Dans cet exemple, vous créez un modèle de fonction de transfert MIMO en concaténant des modèles de fonction de transfert SISO. Considérons la fonction de transfert SISO suivante :
Spécifiez le modèle de fonction de transfert MIMO en concaténant les entrées SISO.
sys1 = tf([1 -1],[1 1]); sys2 = tf([1 2],[1 4 5]); sys = [sys1;sys2]
sys =
From input to output...
s - 1
1: -----
s + 1
s + 2
2: -------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Pour plus d'informations sur la création de fonctions de transfert MIMO, voir Fonctions de transfert MIMO.
Pour cet exemple, créez un modèle de fonction de transfert en temps continu avec des expressions rationnelles. Il est parfois plus aisé et plus intuitif de recourir à une expression rationnelle plutôt que de spécifier les coefficients polynomiaux du numérateur et du dénominateur.
Considérons le système suivant :
Pour créer le modèle de fonction de transfert, commencez par spécifier s en tant qu’objet tf.
s = tf('s')s = s Continuous-time transfer function. Model Properties
Créez le modèle de fonction de transfert en utilisant s dans l’expression rationnelle.
sys = s/(s^2 + 2*s + 10)
sys =
s
--------------
s^2 + 2 s + 10
Continuous-time transfer function.
Model Properties
Pour cet exemple, créez un modèle de fonction de transfert en temps discret au moyen d’une expression rationnelle. Il est parfois plus aisé et plus intuitif de recourir à une expression rationnelle plutôt que de spécifier des coefficients polynomiaux.
Considérons le système suivant :
Pour créer le modèle de fonction de transfert, commencez par spécifier z en tant qu’objet tf et le pas d’échantillonnage Ts.
ts = 0.1;
z = tf('z',ts)z = z Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
Créez le modèle de fonction de transfert en utilisant z dans l’expression rationnelle.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Pour cet exemple, créez un modèle de fonction de transfert avec les propriétés héritées d’un autre modèle du même type. Considérons les deux fonctions de transfert suivantes :
Pour cet exemple, créez sys1 en configurant les propriétés TimeUnit et InputDelay en minutes.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Créez le deuxième modèle de fonction de transfert avec les propriétés héritées de sys1.
numerator2 = [1,-1]; denominator2 = [7,2,0,0,9]; sys2 = tf(numerator2,denominator2,sys1)
sys2 =
s - 1
-----------------
7 s^4 + 2 s^3 + 9
Continuous-time transfer function.
Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
Comme vous pouvez le constater, le modèle de fonction de transfert sys2 comporte les mêmes propriétés que sys1.
Vous pouvez utiliser une boucle for pour spécifier un tableau de modèles de fonction de transfert.
Commencez par pré-attribuer le tableau des fonctions de transfert avec des zéros.
sys = tf(zeros(1,1,3));
Les deux premiers indices représentent le nombre de sorties et d'entrées pour les modèles, tandis que le troisième indice correspond au nombre de modèles figurant dans le tableau.
Créez le tableau de modèles de fonction de transfert en utilisant une expression rationnelle dans la boucle for.
s = tf('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-----------
s^2 + s + 1
sys(:,:,2,1) =
2
-----------
s^2 + s + 2
sys(:,:,3,1) =
3
-----------
s^2 + s + 3
3x1 array of continuous-time transfer functions.
Model Properties
Pour cet exemple, calculez la fonction de transfert du modèle de représentation d’état suivant :
Créez le modèle de représentation d’état au moyen des matrices de représentation d’état.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Convertissez le modèle de représentation d’état ltiSys en une fonction de transfert.
sys = tf(ltiSys)
sys =
From input 1 to output:
s
-------------
s^2 + 4 s + 5
From input 2 to output:
s^2 + 5 s + 8
-------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Pour cet exemple, extrayez la composante mesurée et la composante de bruit d’un modèle polynomial identifié vers deux fonctions de transfert distinctes.
Chargez le modèle polynomial de Box-Jenkins ltiSys dans identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys est un modèle identifié en temps discret du type : où représente la composante mesurée et , la composante de bruit.
Extrayez la composante mesurée et la composante de bruit en tant que fonctions de transfert.
sysMeas = tf(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.1426 z^-1 + 0.1958 z^-2
z^(-2) * ----------------------------
1 - 1.575 z^-1 + 0.6115 z^-2
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
sysNoise = tf(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.04556 + 0.03301 z^-1
----------------------------------------
1 - 1.026 z^-1 + 0.26 z^-2 - 0.1949 z^-3
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
La composante mesurée peut servir de modèle de système physique tandis que la composante de bruit peut être utilisée en tant que modèle de perturbations pour le design du système de contrôle.
Les objets de modèle de fonction de transfert comportent des données de modèle qui vous aident à assurer le suivi de ce que représente le modèle. Par exemple, vous pouvez attribuer des noms aux entrées et sorties de votre modèle.
Considérons le modèle de fonction de transfert MIMO en temps continu suivant :
Le modèle comporte une entrée et deux sorties , le couple et la vitesse angulaire.
Commencez par spécifier les coefficients du numérateur et du dénominateur du modèle.
numerators = {[1 1] ; 1};
denominators = {[1 2 2] ; [1 0]};Créez le modèle de fonction de transfert en spécifiant le nom de l'entrée et les noms des sorties.
sys = tf(numerators,denominators,'InputName','Current',... 'OutputName',{'Torque' 'Angular Velocity'})
sys =
From input "Current" to output...
s + 1
Torque: -------------
s^2 + 2 s + 2
1
Angular Velocity: -
s
Continuous-time transfer function.
Model Properties
Pour cet exemple, spécifiez l’ordre polynomial dans la fonction de transfert en temps discret au moyen de la propriété Variable.
Considérons les fonctions de transfert en temps discret suivantes avec un pas d’échantillonnage de 0,1 s :
Créez la fonction de transfert en temps discret en spécifiant les coefficients z.
numerator = [1,0,0]; denominator = [1,2,3]; ts = 0.1; sys1 = tf(numerator,denominator,ts)
sys1 =
z^2
-------------
z^2 + 2 z + 3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Les coefficients de sys1 sont classés dans l’ordre des puissances décroissantes de z.
tf change de convention sur la base de la valeur de la propriété Variable. Étant donné que sys2 est le modèle de fonction de transfert inverse de sys1, spécifiez Variable en tant que z^-1 et utilisez les mêmes coefficients pour le numérateur et le dénominateur.
sys2 = tf(numerator,denominator,ts,'Variable','z^-1')
sys2 =
1
-------------------
1 + 2 z^-1 + 3 z^-2
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Les coefficients de sys2 sont à présent classés dans l’ordre des puissances croissantes de z^-1.
Sur la base des différentes conventions, vous pouvez spécifier l’ordre polynomial dans les modèles de fonction de transfert au moyen de la propriété Variable.
Dans cet exemple, vous allez créer un filtre passe-bas avec un seul paramètre réglable, a :
Étant donné que les coefficients du numérateur et du dénominateur d’un bloc tunableTF sont indépendants, vous ne pouvez pas utiliser tunableTF pour représenter F. Au lieu de cela, construisez F avec l’objet de paramètre réel réglable realp.
Créez un paramètre réglable réel avec une valeur initiale de 10.
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
Utilisez tf pour créer le filtre passe-bas réglable F.
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Model Properties Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F est un objet genss doté du paramètre réglable a dans sa propriété Blocks. Vous pouvez connecter F avec d’autres modèles réglables ou numériques afin de créer des modèles de systèmes de contrôle plus complexes. Pour un exemple, voir Control System with Tunable Components.
Dans cet exemple, vous allez créer un modèle de fonction de transfert MIMO à gain statique.
Considérons la matrice de gain statique suivante à deux entrées et deux sorties m :
Spécifiez la matrice de gain et créez le modèle de fonction de transfert à gain statique.
m = [2,4;...
3,5];
sys1 = tf(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
Vous pouvez utiliser le modèle de fonction de transfert à gain statique sys1 obtenu précédemment et l’organiser en cascade avec un autre modèle de fonction de transfert.
Pour cet exemple, créez un autre modèle de fonction de transfert à deux entrées et deux sorties, et utilisez la fonction series pour connecter les deux modèles.
numerators = {1,[1,0];[-1,2],3};
denominator = [1,0.3];
ts = 0.2;
sys2 = tf(numerators,denominator,ts)sys2 =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
3 z^2 + 2.9 z + 0.6
1: -------------------
z^2 + 0.6 z + 0.09
-2 z^2 + 12.4 z + 3.9
2: ---------------------
z^2 + 0.6 z + 0.09
From input 2 to output...
5 z^2 + 5.5 z + 1.2
1: -------------------
z^2 + 0.6 z + 0.09
-4 z^2 + 21.8 z + 6.9
2: ---------------------
z^2 + 0.6 z + 0.09
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Depuis R2025a
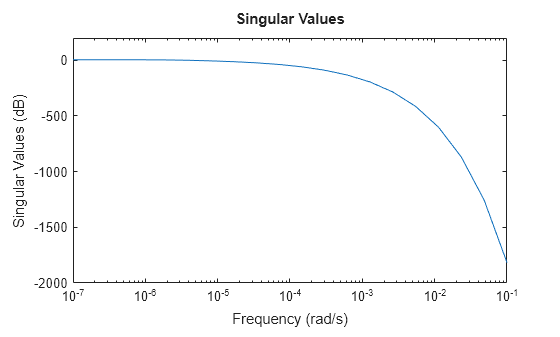
Cet exemple indique comment obtenir un modèle de fonction de transfert tronqué d’un modèle de représentation d’état parcimonieux. Cet exemple utilise un modèle parcimonieux obtenu à partir de la linéarisation d’un modèle thermique de distribution de la chaleur dans une tige de vérin circulaire.
Chargez les données du modèle.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
Analysez la réponse en fréquence du modèle.
sigmaplot(sys,w)
Pour obtenir une approximation tronquée, utilisez tf et spécifiez la bande de fréquence d’attention. Pour ce modèle, vous pouvez utiliser une plage de fréquence de 0 rad/s à 0,01 rad/s pour obtenir l’approximation d’ordre faible.
tsys = tf(sys,Focus=[0 1e-2],Display="off");Comparez la réponse en fréquence.
sigmaplot(sys,tsys,w)
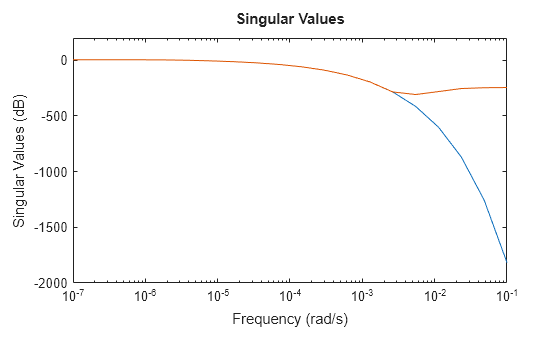
Ce modèle thermique présente une atténuation très abrupte sous 0,001 rad/s. Par défaut, le modèle réduit obtenu au moyen de tf ne fournit pas de bonne correspondance à cette atténuation. Pour atténuer cela, vous pouvez utiliser l’argument RollOff de tf et spécifier une valeur d’atténuation minimale au-delà de la bande de fréquence d’attention. Spécifiez une valeur de pente d’atténuation de -45, qui correspond à une vitesse d’au moins –900 dB/décade.
tsys2 = tf(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,tsys2,w)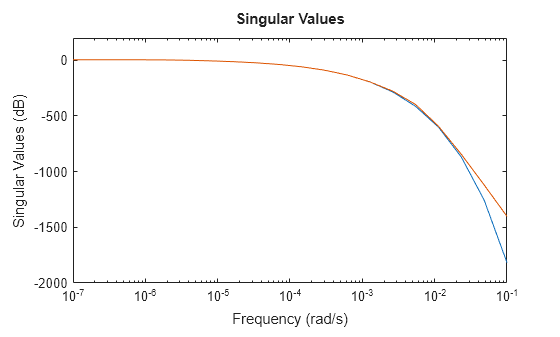
Le modèle réduit fournit maintenant une bien meilleure approximation de la valeur d’atténuation. Cependant, dans cet exemple, réajuster la pente d’atténuation au moyen de tf nécessite de recalculer les zéros et les pôles. Cela pourrait devenir coûteux en calcul dans le cas de modèles à grande échelle. Comme alternative, vous pouvez utiliser la méthode de troncature zéro-pôle de reducespec et ajuster l’atténuation sans coût de calcul supplémentaire, après que le logiciel a calculé les pôles et les zéros. Pour un exemple, voir Zero-Pole Truncation of Thermal Model.
Limitations
Les modèles de fonction de transfert sont mal adaptés aux calculs numériques. Une fois créés, convertissez-les en modèles de représentation d’état avant de les associer à d'autres modèles ou de les transformer. Vous pouvez alors reconvertir les modèles obtenus en fonctions de transfert à des fins d’inspection
Un modèle non linéaire identifié ne peut pas être converti directement en modèle de fonction de transfert au moyen de
tf. Pour obtenir un modèle de fonction de transfert :Convertissez le modèle non linéaire identifié en un modèle LTI identifié au moyen de
linapp(System Identification Toolbox), deidnlarx/linearize(System Identification Toolbox) ou deidnlhw/linearize(System Identification Toolbox).Convertissez ensuite le modèle obtenu en un modèle de fonction de transfert au moyen de
tf.
Algorithmes
Pour convertir des modèles parcimonieux, tf utilise l’algorithme de Krylov-Schur [1] pour les itérations de puissance inverse pour calculer les pôles et les zéros dans la bande de fréquence.
Références
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.