complementaryFilter
Estimer l'orientation à l'aide d'un filtre complémentaire
Description
Le complementaryFilter System object™ fusionne les données des capteurs de l'accéléromètre, du gyroscope et du magnétomètre pour estimer l'orientation et la vitesse angulaire de l'appareil.
Pour estimer l'orientation à l'aide de cet objet :
Créez l'objet
complementaryFilteret définissez ses propriétés.Appelez l'objet avec des arguments, comme s'il s'agissait d'une fonction.
Pour en savoir plus sur le fonctionnement des objets système, voir What Are System Objects?
Création
Syntaxe
Description
FUSE = complementaryFiltercomplementaryFilter System object, FUSE, pour la fusion de capteurs d'accéléromètre, de gyroscope et de magnétomètre données pour estimer l’orientation et la vitesse angulaire de l’appareil.
FUSE = complementaryFilter('ReferenceFrame',RF)complementaryFilter System object qui fusionne les données de l'accéléromètre, du gyroscope et du magnétomètre pour estimer l'orientation de l'appareil par rapport au cadre de référence RF. Spécifiez RF comme 'NED' (Nord-Est-Bas) ou 'ENU' (Est-Nord-Haut). La valeur par défaut est 'NED'.
FUSE = complementaryFilter(___,Name,Value)Name sur le Value spécifié. Les propriétés non spécifiées ont des valeurs par défaut.
Propriétés
Utilisation
Syntaxe
Description
[ fusionne les données de l'accéléromètre, du gyroscope et du magnétomètre pour calculer l'orientation et la vitesse angulaire. Pour utiliser cette syntaxe, définissez la propriété orientation,angularVelocity] = FUSE(accelReadings,gyroReadings,magReadings)HasMagnetometer sur true.
[ fusionne les données de l'accéléromètre et du gyroscope pour calculer l'orientation et la vitesse angulaire. Pour utiliser cette syntaxe, définissez la propriété orientation,angularVelocity] = FUSE(accelReadings,gyroReadings)HasMagnetometer sur false.
Arguments en entrée
Arguments de sortie
Fonctions d'objet
Pour utiliser une fonction objet, spécifiez le System object comme premier argument d'entrée. Par exemple, pour libérer les ressources système d'un System object nommé obj, utilisez cette syntaxe :
release(obj)
Exemples
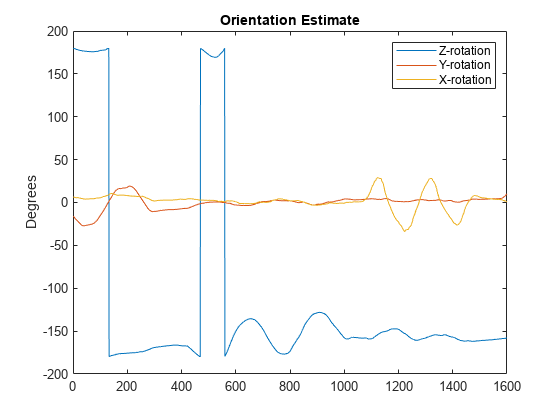
Chargez le fichier rpy_9axis , qui contient les données enregistrées des capteurs d'accéléromètre, de gyroscope et de magnétomètre à partir d'un appareil oscillant en tangage (autour de l'axe y), puis en lacet (autour de l'axe z), puis roulez (autour de l'axe x ). Le fichier contient également la fréquence d'échantillonnage de l'enregistrement.
ld = load('rpy_9axis.mat');
accel = ld.sensorData.Acceleration;
gyro = ld.sensorData.AngularVelocity;
mag = ld.sensorData.MagneticField;Créez un objet filtre complémentaire avec une fréquence d'échantillonnage égale à la fréquence des données.
Fs = ld.Fs; % Hz fuse = complementaryFilter('SampleRate', Fs);
Fusionnez les données de l'accéléromètre, du gyroscope et du magnétomètre à l'aide du filtre.
q = fuse(accel, gyro, mag);
Visualisez les résultats.
plot(eulerd( q, 'ZYX', 'frame')); title('Orientation Estimate'); legend('Z-rotation', 'Y-rotation', 'X-rotation'); ylabel('Degrees');
Références
[1] Valenti, R., I. Dryanovski, and J. Xiao. "Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs." Sensors. Vol. 15, Number 8, 2015, pp. 19302-19330.
Capacités étendues
Historique des versions
Introduit dans R2019b