gnssconstellation
Emplacements des satellites à une heure précise
Syntaxe
Description
[ renvoie les positions et les vitesses des satellites au satPos,satVel] = gnssconstellation(t)datetime t. La fonction renvoie les positions et les vitesses dans le système de coordonnées centré sur la Terre et fixe (ECEF), respectivement en mètres et en mètres par seconde. Si le fuseau horaire de la date/heure n’est pas spécifié, il est supposé être UTC.
[ spécifie en outre le type de fichier GNSS à partir duquel vous avez obtenu les données du message de navigation. Cette syntaxe vous permet de traiter les données de navigation obtenues à partir d'un fichier RINEX, d'un fichier d'almanach SEM, d'un fichier d'almanach YUMA ou d'un fichier d'almanach Galileo XML.satPos,satVel,satID] = gnssconstellation(t,navData,GNSSFileType=gnssFileType)
Remarque
La fonction gnssconstellation détermine la position et la vitesse du satellite en propageant les paramètres orbitaux actuels spécifiés par le fichier RINEX, le fichier d'almanach SEM, un fichier d'almanach YUMA ou un fichier d'almanach Galileo XML à l'heure de la requête. Pour obtenir des positions et des vitesses satellites plus précises, assurez-vous d'utiliser le fichier de navigation publié pour l'heure à laquelle vous effectuez la requête.
Exemples
Obtenez les positions et vitesses actuelles des satellites GNSS. Accédez aux paramètres orbitaux à partir de la spécification d'interface IS-GPS-200M et calculez la position et les vitesses en coordonnées ECEF pour le temps donné. Afficher les positions des satellites.
t = datetime('now','TimeZone','Local'); [satPos,satVel] = gnssconstellation(t); disp(satPos)
1.0e+07 *
1.7636 -1.9840 -0.0868
-1.6347 -0.3626 -2.0617
0.7402 1.3977 2.1337
-0.3600 2.0641 1.6321
-2.5537 -0.7098 -0.1708
-2.5028 0.0618 0.8869
0.0198 -1.5467 -2.1591
1.7781 1.4044 1.3857
1.3632 -1.1150 -1.9881
-0.1920 -2.5266 -0.7961
-1.5815 -0.0632 2.1328
-1.0861 1.3173 2.0346
1.3851 2.0083 -1.0500
2.0696 -0.6477 -1.5334
-2.0051 1.6793 0.4621
-1.5270 2.1220 -0.4685
0.1150 -1.9608 1.7878
1.4951 0.5719 -2.1194
-1.0680 1.2522 -2.0846
-2.0089 -1.2944 1.1588
2.4990 -0.0699 0.8969
-0.8593 -1.5937 1.9432
-1.4255 -1.9308 -1.1376
1.4570 -0.4448 2.1756
0.9583 -1.5291 1.9488
0.3812 2.5691 -0.5555
-0.4773 2.1131 -1.5366
Utilisez la fonction lookangles pour obtenir les angles d'azimut et d'élévation des satellites pour des positions données du satellite et du récepteur. Spécifiez un angle de masque de 5 degrés. Obtenez les positions des satellites en utilisant la fonction gnssconstellation .
Spécifiez une position du récepteur en coordonnées géodésiques (latitude, longitude, altitude).
recPos = [42 -71 50];
Obtenez les positions des satellites pour l'heure actuelle.
t = datetime('now');
gpsSatPos = gnssconstellation(t);Spécifiez un angle de masque de 5 degrés.
maskAngle = 5;
Obtenez les angles de vue en azimut et en élévation pour les positions des satellites. La sortie vis indique quels satellites sont visibles. Obtenez le total en utilisant nnz.
[az,el,vis] = lookangles(recPos,gpsSatPos,maskAngle);
fprintf('%d satellites visible at %s.\n',nnz(vis),t);8 satellites visible at 16-Oct-2023 22:47:48.
Lisez un ensemble de satellites GPS à partir du message de navigation GPS dans un fichier RINEX.
filename = "GODS00USA_R_20211750000_01D_GN.rnx";
data = rinexread(filename);
gpsData = data.GPS;
[~,satIdx] = unique(gpsData.SatelliteID);
gpsData = gpsData(satIdx,:);Obtenez les positions, vitesses et identifiants des satellites dès le premier pas de temps.
t = gpsData.Time(1); [satPos,satVel,satID] = gnssconstellation(t,gpsData)
satPos = 31×3
107 ×
-1.5630 -0.1882 2.1186
1.3808 2.1970 -0.4861
-2.0061 0.7606 1.5492
-2.5625 -0.0140 -0.7096
1.4896 0.5448 -2.1487
0.6129 2.5407 0.4615
-1.0081 1.3751 -1.9877
-2.5811 -0.6135 -0.3246
-1.9289 0.8690 -1.6134
0.9542 -2.2526 1.0113
⋮
satVel = 31×3
103 ×
-0.8888 -2.5914 -0.8416
0.0362 0.7543 3.1043
1.1203 -1.6505 2.2591
-0.8301 -0.4385 2.9967
-1.6023 2.1607 -0.5493
-0.3948 -0.4708 3.1591
-1.0322 -2.4133 -1.1748
0.4370 -0.1710 -3.1339
-1.9860 -0.5032 2.1087
0.9968 -0.8308 -2.8502
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
⋮
Lisez les données des messages de navigation GPS à partir d'un fichier d'almanach SEM.
data = semread("semalmanac_2022-4-10.al3")data=31×16 timetable
Time GPSWeekNumber GPSTimeOfApplicability PRNNumber SVN AverageURANumber Eccentricity InclinationOffset RateOfRightAscension SqrtOfSemiMajorAxis GeographicLongitudeOfOrbitalPlane ArgumentOfPerigee MeanAnomaly ZerothOrderClockCorrection FirstOrderClockCorrection SatelliteHealth SatelliteConfiguration
____________________ _____________ ______________________ _________ ___ ________________ ____________ _________________ ____________________ ___________________ _________________________________ _________________ ___________ __________________________ _________________________ _______________ ______________________
12-Apr-2022 16:50:54 2205 2.3347e+05 1 63 0 0.01171 0.014391 -2.4484e-09 5153.6 -0.9271 0.28359 -0.23387 0.00038624 -7.276e-12 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 2 61 0 0.020515 0.0074596 -2.5029e-09 5153.6 -0.95587 -0.45355 -0.18869 -0.00065327 0 0 9
12-Apr-2022 16:50:54 2205 2.3347e+05 3 69 0 0.0040326 0.0096912 -2.5757e-09 5153.6 -0.59787 0.29979 -0.59118 -0.00020409 -1.4552e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 4 74 0 0.0017715 0.0059814 -2.4665e-09 5153.6 -0.25353 -0.95004 0.31619 -0.00017643 3.638e-12 0 12
12-Apr-2022 16:50:54 2205 2.3347e+05 5 50 0 0.0059118 0.0055599 -2.6193e-09 5153.6 -0.61097 0.32122 0.61334 -7.8201e-05 0 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 6 67 0 0.0026565 0.014187 -2.452e-09 5153.7 -0.92973 -0.28158 -0.1523 0.00026417 1.4552e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 7 48 0 0.015865 0.0028152 -2.5138e-09 5153.6 0.07053 -0.72524 -0.44853 0.00032043 0 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 8 72 0 0.0074387 0.0068531 -2.4738e-09 5153.7 0.72894 0.048076 0.467 -6.3896e-05 0 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 9 68 0 0.0021076 0.0037479 -2.5029e-09 5153.5 -0.27053 0.59743 0.61325 -0.00034428 3.638e-12 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 10 73 0 0.0075555 0.0096321 -2.5793e-09 5153.6 -0.59875 -0.79359 -0.88495 -0.0003767 -1.0914e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 11 78 0 0.00031376 0.0064716 -2.5393e-09 5153.7 -0.9136 0.85276 0.49013 -4.1962e-05 7.276e-12 63 12
12-Apr-2022 16:50:54 2205 2.3347e+05 12 58 0 0.0087256 0.008585 -2.5575e-09 5153.5 0.42482 0.40497 -0.64747 -0.00019932 -7.276e-12 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 13 43 0 0.0058503 0.0083656 -2.4374e-09 5153.6 -0.22159 0.29646 0.31699 0.00029278 7.276e-12 0 9
12-Apr-2022 16:50:54 2205 2.3347e+05 14 77 0 0.0016966 0.0033073 -2.6121e-09 5153.6 0.41456 0.97049 -0.63662 -0.00010204 -3.638e-12 0 12
12-Apr-2022 16:50:54 2205 2.3347e+05 15 55 0 0.013989 -0.003952 -2.5866e-09 5153.7 -0.30476 0.34521 0.16087 -6.9618e-05 3.638e-12 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 16 56 0 0.012782 0.0085545 -2.5611e-09 5153.6 0.43073 0.23073 0.76066 -0.00049114 -3.638e-12 0 9
⋮
Obtenez les positions, les vitesses et les identifiants des satellites dès le premier pas de temps.
t = data.Time(1);
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="SEM")satPos = 31×3
107 ×
1.3899 -2.2151 0.3074
-1.6755 0.5872 -1.9147
1.5377 -1.2781 -1.7528
0.6332 -1.6385 -1.9887
-2.5716 0.5413 0.4215
-1.0251 -1.1336 -2.1646
0.2694 -2.3585 1.1775
1.3414 -0.7139 2.1761
-0.3881 -2.2626 -1.3395
1.5043 1.1879 1.8656
⋮
satVel = 31×3
103 ×
0.0014 0.4854 3.2261
0.8625 -2.4217 -1.4348
2.2113 0.0321 1.9394
1.4081 2.1049 -1.2936
-0.5761 -0.2150 -3.1036
1.2999 -2.4327 0.6643
0.9229 -1.1620 -2.6758
1.5581 2.2893 -0.1743
1.1480 1.2668 -2.4877
-2.3150 0.2417 1.6982
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
⋮
Lisez les données des messages de navigation GPS à partir d'un fichier d'almanach YUMA.
data = yumaread("yumaAlmanac_2022-9-27.alm")data=31×13 timetable
Time PRN Health Eccentricity TimeOfApplicability OrbitalInclination RateOfRightAscen SQRTA RightAscenAtWeek ArgumentOfPerigee MeanAnom Af0 Af1 Week
____________________ ___ ______ ____________ ___________________ __________________ ________________ ______ ________________ _________________ ________ ___________ __________ ____
29-Sep-2022 16:38:06 1 0 0.012008 4.055e+05 0.98891 -7.5432e-09 5153.6 0.3651 0.9438 -1.095 0.00027561 -7.276e-12 2229
29-Sep-2022 16:38:06 2 0 0.02 4.055e+05 0.96685 -7.7946e-09 5154.9 0.27125 -1.393 -1.6195 -0.00064468 0 2229
29-Sep-2022 16:38:06 3 0 0.0044999 4.055e+05 0.97519 -7.726e-09 5153.5 1.3977 1.0651 -2.1966 -0.00035858 -3.638e-12 2229
29-Sep-2022 16:38:06 4 0 0.0020423 4.055e+05 0.96187 -7.966e-09 5153.7 2.4795 -3.1045 0.81839 -0.00011158 7.276e-12 2229
29-Sep-2022 16:38:06 5 0 0.0060811 4.055e+05 0.96224 -7.8403e-09 5153.7 1.3543 1.1188 1.415 -9.8228e-05 0 2229
29-Sep-2022 16:38:06 6 0 0.0024514 4.055e+05 0.98822 -7.5546e-09 5153.5 0.35683 -0.8974 -0.87447 0.00047684 1.0914e-11 2229
29-Sep-2022 16:38:06 7 0 0.016406 4.055e+05 0.95104 -7.7832e-09 5153.6 -2.7871 -2.2412 -1.7241 0.00030327 -3.638e-12 2229
29-Sep-2022 16:38:06 8 0 0.0075631 4.055e+05 0.96192 -8.2403e-09 5153.5 -0.71955 0.16395 1.1555 -8.6784e-05 0 2229
29-Sep-2022 16:38:06 9 0 0.0025387 4.055e+05 0.95495 -8.0575e-09 5153.7 2.4248 1.9083 1.5732 -0.00028992 3.638e-12 2229
29-Sep-2022 16:38:06 10 0 0.0079675 4.055e+05 0.97498 -7.7489e-09 5153.6 1.395 -2.5116 -3.0858 -5.722e-06 0 2229
29-Sep-2022 16:38:06 11 0 0.00075054 4.055e+05 0.96415 -7.7832e-09 5153.6 0.40358 -3.1036 0.81271 -2.0981e-05 -3.638e-12 2229
29-Sep-2022 16:38:06 12 0 0.0085082 4.055e+05 0.96755 -7.966e-09 5153.7 -1.6731 1.3158 -2.4318 -0.0002861 -7.276e-12 2229
29-Sep-2022 16:38:06 13 0 0.0065126 4.055e+05 0.96921 -7.8518e-09 5153.6 2.5812 0.94039 0.67456 0.00039673 7.276e-12 2229
29-Sep-2022 16:38:06 14 0 0.002305 4.055e+05 0.95095 -8.1261e-09 5153.6 -1.708 -3.0302 -2.4903 -0.00010014 3.638e-12 2229
29-Sep-2022 16:38:06 15 0 0.014625 4.055e+05 0.93093 -8.3203e-09 5153.6 2.3127 1.1401 0.17435 -2.4796e-05 3.638e-12 2229
29-Sep-2022 16:38:06 16 0 0.012809 4.055e+05 0.96738 -7.9889e-09 5153.7 -1.6547 0.73255 2.0697 -0.00052547 0 2229
⋮
Obtenez les positions, les vitesses et les identifiants des satellites dès le premier pas de temps.
t = data.Time(1);
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="YUMA")satPos = 31×3
107 ×
-1.3549 2.2358 -0.3793
1.4926 -2.1942 -0.1952
-1.2477 1.2357 -2.0018
-0.4096 2.0385 -1.6467
2.2427 -0.7207 1.2218
1.4711 0.4089 -2.1680
-0.0841 2.0989 1.6373
-1.0615 1.1949 2.1111
0.5989 2.4816 -0.7333
-1.9686 -1.1518 1.4018
⋮
satVel = 31×3
103 ×
-0.4388 0.2295 3.2113
0.0460 0.4065 -3.1646
-2.4900 -0.3576 1.3500
-0.9647 -1.8691 -2.0833
1.5583 0.3175 -2.6224
-1.6003 2.2475 -0.6531
-1.3741 1.5034 -2.0994
-1.2344 -2.3991 0.7711
-0.6518 -0.7124 -2.9785
1.7466 0.0160 2.4627
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
⋮
Lisez les données de navigation à partir d'un fichier d'almanach Galileo et utilisez les données de navigation pour :
Obtenez les positions, les vitesses et les identifiants des satellites à un horodatage donné.
Calculez la visibilité du satellite et les angles de visée pour une position de récepteur donnée en utilisant les positions des satellites extraites.
Tout d’abord, lisez les données des messages de navigation GPS à partir d’un fichier d’almanach Galileo.
filename = "galAlmanac_2019-08-06.xml";
data = galalmanacread(filename)data=22×16 timetable
Time SVID aSqRoot ecc deltai omega0 omegaDot w m0 af0 af1 iod t0a wna statusE5a statusE5b statusE1B
____________________ ____ ________ __________ __________ ________ ___________ ________ _________ ___________ ___________ ___ _________ ____ _________ _________ _________
06-Aug-2019 08:39:42 1 0.011719 0.00022888 0.0030518 -0.11984 -1.8626e-09 -0.81259 -0.053925 -0.00066185 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 2 0.017578 0.00010681 0.0030518 -0.11984 -1.8626e-09 -0.50497 0.63766 7.2479e-05 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 3 0.042969 0.00036621 -0.0076904 -0.78656 -1.7462e-09 -0.1449 0.94464 -0.00019646 -3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 4 0.039062 0.00027466 -0.0076904 -0.78653 -1.7462e-09 -0.40698 -0.041412 -0.00033951 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 5 0.042969 0.00021362 -0.0076904 -0.78656 -1.7462e-09 -0.33777 -0.61145 -0.00045967 3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 7 0.042969 0.00041199 -0.0076904 -0.78656 -1.7462e-09 -0.285 0.58496 -0.00024033 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 8 0.039062 0.00036621 -0.0057983 -0.789 -1.7462e-09 -0.19412 0.74414 0.0063114 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 9 0.039062 0.00045776 -0.0057983 -0.789 -1.7462e-09 -0.21506 -0.4855 0.0063572 -1.0914e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 11 0.017578 0.00038147 0.0021973 0.54333 -1.7462e-09 0.28098 -0.3125 0.0056324 -1.0914e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 12 0.015625 0.0002594 0.0021973 0.54333 -1.7462e-09 0.10056 0.12363 0.0062618 -1.819e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 13 0.021484 1.5259e-05 0.0032349 0.54181 -1.7462e-09 0.23178 0.73837 0.00039101 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:29:42 15 0.017578 3.0518e-05 0.0032349 0.54178 -1.7462e-09 -0.60843 -0.19565 0.00090027 0 3 2.034e+05 1041 0 0 0
06-Aug-2019 08:39:42 19 0.027344 0.00024414 -0.0058594 -0.78732 -1.7462e-09 -0.47565 0.30069 -3.8147e-06 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 21 0.021484 0.00022888 0.0029297 -0.12067 -1.8626e-09 -0.91656 0.30164 -0.00054741 -3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 24 0.011719 0.00024414 0.0022583 -0.11884 -1.8626e-09 0.27414 0.35886 0.0059395 -1.819e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 25 0.027344 0.00032043 0.0029297 -0.1207 -1.8626e-09 -0.7215 -0.89252 0.0017204 -1.0914e-11 4 2.04e+05 1041 0 0 0
⋮
Spécifiez l'horodatage pour lequel rechercher les positions, vitesses et identifiants des satellites.
t = datetime(2021,06,24,01,59,44)
t = datetime
24-Jun-2021 01:59:44
Obtenez les positions, vitesses et identifiants des satellites à l'horodatage spécifié en utilisant la fonction gnssconstellation .
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="galalmanac");Spécifiez la position du récepteur en coordonnées géodésiques (latitude, longitude, altitude) pour calculer les angles de vue et la visibilité du satellite.
recPos = [42.3013162 -71.3782972 0];
Spécifiez l'angle du masque d'élévation pour le récepteur.
maskAngle = 5;
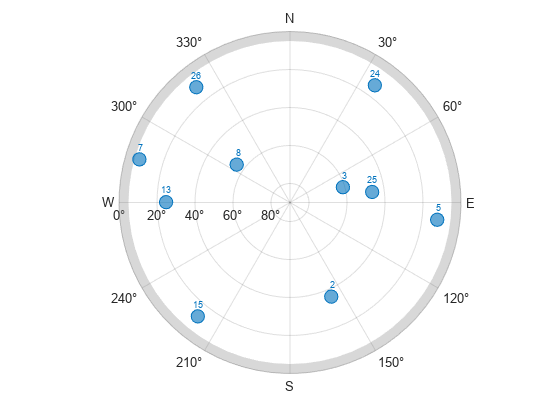
Calculez les angles de regard et les visibilités des positions des satellites pour la position du récepteur donnée. La sortie vis indique quels satellites sont visibles. Obtenez le total en utilisant nnz.
[az,el,vis] = lookangles(recPos,satPos,maskAngle);
fprintf('%d satellites visible at %s.\n',nnz(vis),t)10 satellites visible at 24-Jun-2021 01:59:44.
Tracez les positions des satellites visibles avec le masque d'élévation.
figure skyplot(az(vis),el(vis),satID(vis),MaskElevation=maskAngle)
Arguments d'entrée
Arguments de sortie
En savoir plus
Références
[1] Groves, Paul D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Boston: Artech House, 2013.
[2] International GNSS Service (IGS), Daily 30-Second GPS Broadcast Ephemeris Data, NASA Crustal Dynamics Data Information System (CDDIS), Greenbelt, MD, USA, Jun. 24, 2021. Accessed Jun. 25, 2021. https://dx.doi.org/10.5067/GNSS/gnss_daily_n_001.
[3] United States Coast Guard. "GPS Almanacs, NANUs, and OPS Advisories Archives." US Coast Guard Navigation Center. Accessed May 6, 2022. https://www.navcen.uscg.gov/archives.
[4] QZSS almanac archives, Quasi-Zenith Satellite System(QZSS). "QZSS (Quasi-Zenith Satellite System) - Cabinet Office (Japan)" Accessed September 20, 2022. https://sys.qzss.go.jp/dod/en/archives/pnt.html.
[5] European GNSS Service Centre (GSC). "Galileo Open Service Signal-In-Space Interface Control Document." Accessed March 13, 2023. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.0.pdf.
Capacités étendues
Historique des versions
Introduit dans R2021aVoir aussi
Objets
Fonctions
skyplot|lookangles|pseudoranges|receiverposition|rinexread|rinexinfo|semread|yumaread|galalmanacread