tune
Ajustez les paramètres insfilterAsync pour réduire l'erreur d'estimation
Syntaxe
Description
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)insfilterAsync , filter et les bruits de mesure pour réduire la moyenne quadratique (RMS) erreur d'estimation d'état entre les données du capteur fusionnées et la vérité terrain. La fonction renvoie également le bruit de mesure réglé, tunedMeasureNoise. La fonction utilise les valeurs des propriétés du filtre et le bruit de mesure fourni dans la structure measureNoise comme estimation initiale pour l'algorithme d'optimisation.
tunedMeasureNoise = tune(___,config)tunerconfig , config.
Exemples
Chargez les données de capteur enregistrées et les données de vérité terrain.
load('insfilterAsyncTuneData.mat');Créez des calendriers pour les données des capteurs et les données de vérité.
sensorData = timetable(Accelerometer, Gyroscope, ... Magnetometer, GPSPosition, GPSVelocity, 'SampleRate', 100); groundTruth = timetable(Orientation, Position, ... 'SampleRate', 100);
Créez un objet filtre insfilterAsync qui possède quelques propriétés de bruit.
filter = insfilterAsync('State', initialState, ... 'StateCovariance', initialStateCovariance, ... 'AccelerometerBiasNoise', 1e-7, ... 'GyroscopeBiasNoise', 1e-7, ... 'MagnetometerBiasNoise', 1e-7, ... 'GeomagneticVectorNoise', 1e-7);
Créez un objet de configuration de tuner pour le filtre. Définissez le nombre maximum d'itérations sur deux. Définissez également les paramètres réglables en tant que propriétés non spécifiées.
config = tunerconfig('insfilterAsync','MaxIterations',8); config.TunableParameters = setdiff(config.TunableParameters, ... {'GeomagneticVectorNoise', 'AccelerometerBiasNoise', ... 'GyroscopeBiasNoise', 'MagnetometerBiasNoise'}); config.TunableParameters
ans = 1×10 string
"AccelerationNoise" "AccelerometerNoise" "AngularVelocityNoise" "GPSPositionNoise" "GPSVelocityNoise" "GyroscopeNoise" "MagnetometerNoise" "PositionNoise" "QuaternionNoise" "VelocityNoise"
Utilisez la fonction de bruit du tuner pour obtenir un ensemble de bruits de capteur initiaux utilisés dans le filtre.
measNoise = tunernoise('insfilterAsync')measNoise = struct with fields:
AccelerometerNoise: 1
GyroscopeNoise: 1
MagnetometerNoise: 1
GPSPositionNoise: 1
GPSVelocityNoise: 1
Ajustez le filtre et obtenez les paramètres réglés.
tunedParams = tune(filter,measNoise,sensorData,groundTruth,config);
Iteration Parameter Metric
_________ _________ ______
1 AccelerationNoise 2.1345
1 AccelerometerNoise 2.1264
1 AngularVelocityNoise 1.9659
1 GPSPositionNoise 1.9341
1 GPSVelocityNoise 1.8420
1 GyroscopeNoise 1.7589
1 MagnetometerNoise 1.7362
1 PositionNoise 1.7362
1 QuaternionNoise 1.7218
1 VelocityNoise 1.7218
2 AccelerationNoise 1.7190
2 AccelerometerNoise 1.7170
2 AngularVelocityNoise 1.6045
2 GPSPositionNoise 1.5948
2 GPSVelocityNoise 1.5323
2 GyroscopeNoise 1.4803
2 MagnetometerNoise 1.4703
2 PositionNoise 1.4703
2 QuaternionNoise 1.4632
2 VelocityNoise 1.4632
3 AccelerationNoise 1.4596
3 AccelerometerNoise 1.4548
3 AngularVelocityNoise 1.3923
3 GPSPositionNoise 1.3810
3 GPSVelocityNoise 1.3322
3 GyroscopeNoise 1.2998
3 MagnetometerNoise 1.2976
3 PositionNoise 1.2976
3 QuaternionNoise 1.2943
3 VelocityNoise 1.2943
4 AccelerationNoise 1.2906
4 AccelerometerNoise 1.2836
4 AngularVelocityNoise 1.2491
4 GPSPositionNoise 1.2258
4 GPSVelocityNoise 1.1880
4 GyroscopeNoise 1.1701
4 MagnetometerNoise 1.1698
4 PositionNoise 1.1698
4 QuaternionNoise 1.1688
4 VelocityNoise 1.1688
5 AccelerationNoise 1.1650
5 AccelerometerNoise 1.1569
5 AngularVelocityNoise 1.1454
5 GPSPositionNoise 1.1100
5 GPSVelocityNoise 1.0778
5 GyroscopeNoise 1.0709
5 MagnetometerNoise 1.0675
5 PositionNoise 1.0675
5 QuaternionNoise 1.0669
5 VelocityNoise 1.0669
6 AccelerationNoise 1.0634
6 AccelerometerNoise 1.0549
6 AngularVelocityNoise 1.0549
6 GPSPositionNoise 1.0180
6 GPSVelocityNoise 0.9866
6 GyroscopeNoise 0.9810
6 MagnetometerNoise 0.9775
6 PositionNoise 0.9775
6 QuaternionNoise 0.9768
6 VelocityNoise 0.9768
7 AccelerationNoise 0.9735
7 AccelerometerNoise 0.9652
7 AngularVelocityNoise 0.9652
7 GPSPositionNoise 0.9283
7 GPSVelocityNoise 0.8997
7 GyroscopeNoise 0.8947
7 MagnetometerNoise 0.8920
7 PositionNoise 0.8920
7 QuaternionNoise 0.8912
7 VelocityNoise 0.8912
8 AccelerationNoise 0.8885
8 AccelerometerNoise 0.8811
8 AngularVelocityNoise 0.8807
8 GPSPositionNoise 0.8479
8 GPSVelocityNoise 0.8238
8 GyroscopeNoise 0.8165
8 MagnetometerNoise 0.8165
8 PositionNoise 0.8165
8 QuaternionNoise 0.8159
8 VelocityNoise 0.8159
Fusionnez les données du capteur à l’aide du filtre optimisé.
dt = seconds(diff(groundTruth.Time)); N = size(sensorData,1); qEst = quaternion.zeros(N,1); posEst = zeros(N,3); % Iterate the filter for prediction and correction using sensor data. for ii=1:N if ii ~= 1 predict(filter, dt(ii-1)); end if all(~isnan(Accelerometer(ii,:))) fuseaccel(filter,Accelerometer(ii,:), ... tunedParams.AccelerometerNoise); end if all(~isnan(Gyroscope(ii,:))) fusegyro(filter, Gyroscope(ii,:), ... tunedParams.GyroscopeNoise); end if all(~isnan(Magnetometer(ii,1))) fusemag(filter, Magnetometer(ii,:), ... tunedParams.MagnetometerNoise); end if all(~isnan(GPSPosition(ii,1))) fusegps(filter, GPSPosition(ii,:), ... tunedParams.GPSPositionNoise, GPSVelocity(ii,:), ... tunedParams.GPSVelocityNoise); end [posEst(ii,:), qEst(ii,:)] = pose(filter); end
Calculez les erreurs RMS.
orientationError = rad2deg(dist(qEst, Orientation)); rmsorientationError = sqrt(mean(orientationError.^2))
rmsorientationError = 2.7801
positionError = sqrt(sum((posEst - Position).^2, 2)); rmspositionError = sqrt(mean( positionError.^2))
rmspositionError = 0.5966
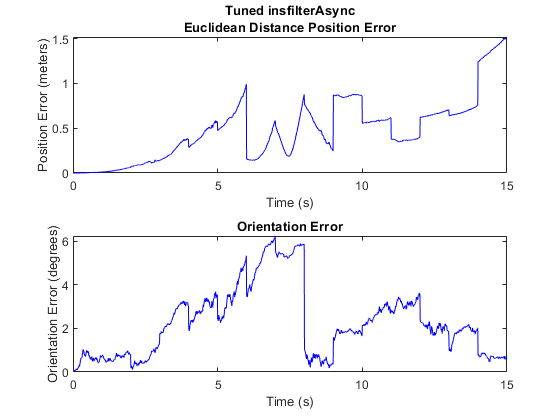
Visualisez les résultats.
figure(); t = (0:N-1)./ groundTruth.Properties.SampleRate; subplot(2,1,1) plot(t, positionError, 'b'); title("Tuned insfilterAsync" + newline + "Euclidean Distance Position Error") xlabel('Time (s)'); ylabel('Position Error (meters)') subplot(2,1,2) plot(t, orientationError, 'b'); title("Orientation Error") xlabel('Time (s)'); ylabel('Orientation Error (degrees)');
Arguments d'entrée
Arguments de sortie
Références
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Historique des versions
Introduit dans R2020b