perturb
Appliquer des perturbations à un objet
Syntaxe
Description
offsets = perturb(obj)obj et renvoie les valeurs de décalage. Vous pouvez définir des perturbations sur l'objet en utilisant la fonction perturbations .
Exemples
Définissez une trajectoire de waypoint. Par défaut, cette trajectoire contient deux waypoints.
traj = waypointTrajectory
traj =
waypointTrajectory with properties:
SampleRate: 100
SamplesPerFrame: 1
Waypoints: [2x3 double]
TimeOfArrival: [2x1 double]
Velocities: [2x3 double]
Course: [2x1 double]
GroundSpeed: [2x1 double]
ClimbRate: [2x1 double]
Orientation: [2x1 quaternion]
AutoPitch: 0
AutoBank: 0
ReferenceFrame: 'NED'
Définir les perturbations sur la propriété Waypoints et la propriété TimeOfArrival .
rng(2020); perturbs1 = perturbations(traj,'Waypoints','Normal',1,1)
perturbs1=2×3 table
Property Type Value
_______________ ________ __________________
"Waypoints" "Normal" {[ 1]} {[ 1]}
"TimeOfArrival" "None" {[NaN]} {[NaN]}
perturbs2 = perturbations(traj,'TimeOfArrival','Selection',{[0;1],[0;2]})
perturbs2=2×3 table
Property Type Value
_______________ ___________ _______________________________
"Waypoints" "Normal" {[ 1]} {[ 1]}
"TimeOfArrival" "Selection" {1x2 cell} {[0.5000 0.5000]}
Perturber la trajectoire.
offsets = perturb(traj)
offsets=2×1 struct array with fields:
Property
Offset
PerturbedValue
La propriété Waypoints et la propriété TimeOfArrival ont changé.
traj.Waypoints
ans = 2×3
1.8674 1.0203 0.7032
2.3154 -0.3207 0.0999
traj.TimeOfArrival
ans = 2×1
0
2
Créez un objet insSensor .
sensor = insSensor
sensor =
insSensor with properties:
MountingLocation: [0 0 0] m
RollAccuracy: 0.2 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: [1 1 1] m
VelocityAccuracy: 0.05 m/s
AccelerationAccuracy: 0 m/s²
AngularVelocityAccuracy: 0 deg/s
TimeInput: [1⨯1 logical]
RandomStream: 'Global stream'
Définissez la perturbation sur la propriété RollAccuracy comme trois valeurs avec chacune une possibilité égale.
values = {0.1 0.2 0.3}values=1×3 cell array
{[0.1000]} {[0.2000]} {[0.3000]}
probabilities = [1/3 1/3 1/3]
probabilities = 1×3
0.3333 0.3333 0.3333
perturbations(sensor,'RollAccuracy','Selection',values,probabilities)
ans=7×3 table
Property Type Value
_________________________ ___________ ______________________________________
"RollAccuracy" "Selection" {1x3 cell} {[0.3333 0.3333 0.3333]}
"PitchAccuracy" "None" {[ NaN]} {[ NaN]}
"YawAccuracy" "None" {[ NaN]} {[ NaN]}
"PositionAccuracy" "None" {[ NaN]} {[ NaN]}
"VelocityAccuracy" "None" {[ NaN]} {[ NaN]}
"AccelerationAccuracy" "None" {[ NaN]} {[ NaN]}
"AngularVelocityAccuracy" "None" {[ NaN]} {[ NaN]}
Perturbez l'objet sensor en utilisant la fonction perturber.
rng(2020) perturb(sensor); sensor
sensor =
insSensor with properties:
MountingLocation: [0 0 0] m
RollAccuracy: 0.5 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: [1 1 1] m
VelocityAccuracy: 0.05 m/s
AccelerationAccuracy: 0 m/s²
AngularVelocityAccuracy: 0 deg/s
TimeInput: [1⨯1 logical]
RandomStream: 'Global stream'
Le RollAccuracy est perturbé à 0.5 deg.
Créez un objet imuSensor et affichez ses propriétés perturbables.
imu = imuSensor; perturbations(imu)
ans=17×3 table
Property Type Value
______________________________________ ______ __________________
"Accelerometer.MeasurementRange" "None" {[NaN]} {[NaN]}
"Accelerometer.Resolution" "None" {[NaN]} {[NaN]}
"Accelerometer.ConstantBias" "None" {[NaN]} {[NaN]}
"Accelerometer.NoiseDensity" "None" {[NaN]} {[NaN]}
"Accelerometer.BiasInstability" "None" {[NaN]} {[NaN]}
"Accelerometer.RandomWalk" "None" {[NaN]} {[NaN]}
"Accelerometer.TemperatureBias" "None" {[NaN]} {[NaN]}
"Accelerometer.TemperatureScaleFactor" "None" {[NaN]} {[NaN]}
"Gyroscope.MeasurementRange" "None" {[NaN]} {[NaN]}
"Gyroscope.Resolution" "None" {[NaN]} {[NaN]}
"Gyroscope.ConstantBias" "None" {[NaN]} {[NaN]}
"Gyroscope.NoiseDensity" "None" {[NaN]} {[NaN]}
"Gyroscope.BiasInstability" "None" {[NaN]} {[NaN]}
"Gyroscope.RandomWalk" "None" {[NaN]} {[NaN]}
"Gyroscope.TemperatureBias" "None" {[NaN]} {[NaN]}
"Gyroscope.TemperatureScaleFactor" "None" {[NaN]} {[NaN]}
⋮
Spécifiez la perturbation pour la propriété NoiseDensity de l'accéléromètre sous forme de distribution uniforme.
perturbations(imu,'Accelerometer.NoiseDensity', ... 'Uniform',1e-5,1e-3);
Spécifiez la perturbation pour la propriété RandomWalk du gyroscope sous la forme d'une distribution normale tronquée.
perts = perturbations(imu,'Gyroscope.RandomWalk', ... 'TruncatedNormal',2,1e-5,0,Inf);
Chargez les données IMU préenregistrées.
load imuSensorData.mat
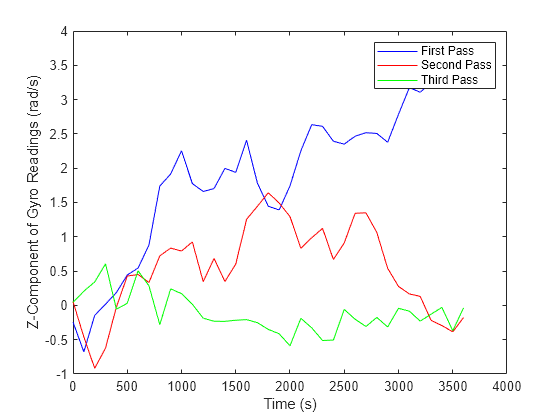
numSamples = size(orientations);Simulez le imuSensor trois fois avec différentes réalisations de perturbations.
rng(2021); % For repeatable results numRuns = 3; colors = ['b' 'r' 'g']; for idx = 1:numRuns % Clone IMU to maintain original values imuCopy = clone(imu); % Perturb noise values offsets = perturb(imuCopy); % Obtain the measurements [accelReadings,gyroReadings] = imuCopy(accelerations,angularVelocities,orientations); % Plot the results plot(times,gyroReadings(:,3),colors(idx)); hold on; end xlabel('Time (s)') ylabel('Z-Component of Gyro Readings (rad/s)') legend("First Pass","Second Pass","Third Pass"); hold off
Arguments d'entrée
Arguments de sortie
Historique des versions
Introduit dans R2020b