waypointTrajectory
Générateur de trajectoire de waypoint
Description
Le waypointTrajectory System object™ génère des trajectoires basées sur des waypoints spécifiés. Lorsque vous créez le System object, vous pouvez choisir de spécifier l'heure d'arrivée, la vitesse ou la vitesse sol à chaque waypoint. Vous pouvez éventuellement spécifier d'autres propriétés telles que l'orientation à chaque waypoint. Voir Algorithmes pour plus de détails.
Pour générer une trajectoire à partir de waypoints :
Créez l'objet
waypointTrajectoryet définissez ses propriétés.Appelez l'objet comme s'il s'agissait d'une fonction.
Pour en savoir plus sur le fonctionnement des objets système, consultez What Are System Objects?.
Création
Syntaxe
Description
trajectory = waypointTrajectorytrajectory, qui génère une trajectoire basée sur des waypoints stationnaires par défaut.
trajectory = waypointTrajectory(Waypoints,TimeOfArrival)TimeOfArrival pour plus de détails.
Conseil
Lorsque vous spécifiez l'argument TimeOfArrival , vous ne devez pas spécifier ces propriétés :
JerkLimitInitialTimeWaitTime
trajectory = waypointTrajectory(Waypoints,GroundSpeed=groundSpeed)GroundSpeed pour plus de détails.
trajectory = waypointTrajectory(Waypoints,Velocities=velocities)Velocities pour plus de détails.
trajectory = waypointTrajectory(___,Name=Value)
Exemple : trajectory = waypointTrajectory([10,10,0;20,20,0;20,20,10],[0,0.5,10]) crée un System object de trajectoire de point de cheminement, trajectory, qui commence au point de cheminement [10,10,0], puis passe par [20,20,0] après 0,5 seconde et [20,20,10] après 10 secondes.
Propriétés
Utilisation
Description
[ génère une trame de données de trajectoire basée sur les arguments et propriétés de création spécifiés.position,orientation,velocity,acceleration,angularVelocity] = trajectory()
Arguments de sortie
Fonctions d'objet
Pour utiliser une fonction objet, spécifiez le System object comme premier argument d'entrée. Par exemple, pour libérer les ressources système d'un System object nommé obj, utilisez cette syntaxe :
release(obj)
Exemples
trajectory = waypointTrajectory
trajectory =
waypointTrajectory with properties:
SampleRate: 100
SamplesPerFrame: 1
Waypoints: [2x3 double]
TimeOfArrival: [2x1 double]
Velocities: [2x3 double]
Course: [2x1 double]
GroundSpeed: [2x1 double]
ClimbRate: [2x1 double]
Orientation: [2x1 quaternion]
AutoPitch: 0
AutoBank: 0
ReferenceFrame: 'NED'
Inspectez les waypoints par défaut et les heures d'arrivée en appelant waypointInfo. Par défaut, les waypoints indiquent une position stationnaire pendant une seconde.
waypointInfo(trajectory)
ans=2×2 table
TimeOfArrival Waypoints
_____________ ___________
0 0 0 0
1 0 0 0
Créez une trajectoire carrée et examinez la relation entre les contraintes de point de cheminement, la fréquence d'échantillonnage et la trajectoire générée.
Créez une trajectoire carrée en définissant les sommets du carré. Définissez l'orientation à chaque waypoint comme pointant dans la direction du mouvement. Spécifiez une fréquence d'échantillonnage de 1 Hz et utilisez la valeur par défaut SamplesPerFrame de 1.
waypoints = [0,0,0; ... % Initial position 0,1,0; ... 1,1,0; ... 1,0,0; ... 0,0,0]; % Final position toa = 0:4; % time of arrival orientation = quaternion([0,0,0; ... 45,0,0; ... 135,0,0; ... 225,0,0; ... 0,0,0], ... "eulerd","ZYX","frame"); trajectory = waypointTrajectory(waypoints, ... TimeOfArrival=toa, ... Orientation=orientation, ... SampleRate=1);
Créez une figure et tracez la position initiale de la plate-forme.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on

Dans une boucle, parcourez la trajectoire pour afficher la position actuelle et l'orientation actuelle. Tracez la position actuelle et enregistrez l'orientation. Utilisez pause pour imiter le traitement en temps réel.
orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end hold off

Convertissez les quaternions d'orientation en angles d'Euler pour une interprétation facile, puis tracez l'orientation au fil du temps.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); plot(toa,eulerAngles(:,1),"ko", ... toa,eulerAngles(:,2),"bd", ... toa,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis","Rotation around Y-axis","Rotation around X-axis") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on

Jusqu'à présent, l'objet trajectoire n'a généré que les waypoints spécifiés lors de la construction. Pour interpoler entre les waypoints, augmentez la fréquence d'échantillonnage jusqu'à une fréquence plus rapide que l'heure d'arrivée des waypoints. Réglez la fréquence d'échantillonnage trajectory sur 100 Hz et appelez reset.
trajectory.SampleRate = 100; reset(trajectory)
Créez une figure et tracez la position initiale de la plate-forme. Dans une boucle, parcourez la trajectoire pour afficher la position actuelle et l'orientation actuelle. Tracez la position actuelle et enregistrez l'orientation. Utilisez pause pour imiter le traitement en temps réel.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end hold off

La sortie de trajectoire apparaît désormais circulaire. En effet, l' System object™ waypointTrajectory minimise l'accélération et la vitesse angulaire lors de l'interpolation, ce qui se traduit par des mouvements plus fluides et plus réalistes dans la plupart des scénarios.
Convertissez les quaternions d'orientation en angles d'Euler pour une interprétation facile, puis tracez l'orientation au fil du temps. L'orientation est également interpolée.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); t = 0:1/trajectory.SampleRate:4; plot(t,eulerAngles(:,1),"ko", ... t,eulerAngles(:,2),"bd", ... t,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis","Rotation around Y-axis","Rotation around X-axis") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on

L'algorithme waypointTrajectory interpole les waypoints pour créer une trajectoire fluide. Pour revenir à la trajectoire carrée, prévoyez plus de waypoints, notamment autour des changements brusques. Pour suivre les temps, les waypoints et l'orientation correspondants, spécifiez toutes les informations de trajectoire dans une seule matrice.
% Time, Waypoint, Orientation trajectoryInfo = [0, 0,0,0, 0,0,0; ... % Initial position 0.1, 0,0.1,0, 0,0,0; ... 0.9, 0,0.9,0, 0,0,0; ... 1, 0,1,0, 45,0,0; ... 1.1, 0.1,1,0, 90,0,0; ... 1.9, 0.9,1,0, 90,0,0; ... 2, 1,1,0, 135,0,0; ... 2.1, 1,0.9,0, 180,0,0; ... 2.9, 1,0.1,0, 180,0,0; ... 3, 1,0,0, 225,0,0; ... 3.1, 0.9,0,0, 270,0,0; ... 3.9, 0.1,0,0, 270,0,0; ... 4, 0,0,0, 270,0,0]; % Final position trajectory = waypointTrajectory(trajectoryInfo(:,2:4), ... TimeOfArrival=trajectoryInfo(:,1), ... Orientation=quaternion(trajectoryInfo(:,5:end),"eulerd","ZYX","frame"), ... SampleRate=100);
Créez une figure et tracez la position initiale de la plate-forme. Dans une boucle, parcourez la trajectoire pour afficher la position actuelle et l'orientation actuelle. Tracez la position actuelle et enregistrez l'orientation. Utilisez pause pour imiter le traitement en temps réel.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count+1; end hold off

La sortie de trajectoire apparaît désormais plus carrée, en particulier autour des sommets avec des waypoints.
Convertissez les quaternions d'orientation en angles d'Euler pour une interprétation facile, puis tracez l'orientation au fil du temps.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); t = 0:1/trajectory.SampleRate:4; eulerAngles = plot(t,eulerAngles(:,1),"ko", ... t,eulerAngles(:,2),"bd", ... t,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis", ... "Rotation around Y-axis", ... "Rotation around X-axis", ... "Location", "SouthWest") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on

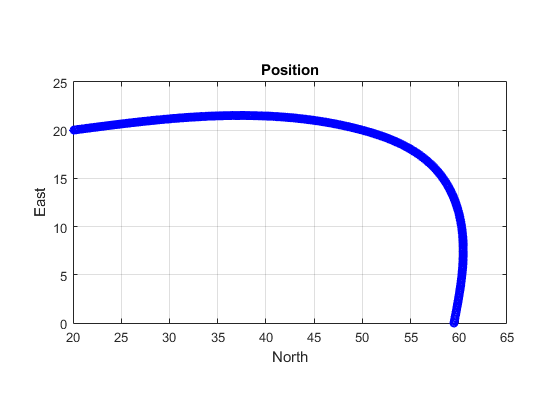
Cet exemple montre comment créer une trajectoire d'arc à l'aide de l' waypointTrajectory System object™. waypointTrajectory crée un chemin à travers des points de cheminement spécifiés qui minimise l'accélération et la vitesse angulaire. Après avoir créé une trajectoire d'arc, vous limitez la trajectoire à l'intérieur de limites prédéfinies.
Créer une trajectoire d'arc
Définissez une matrice de contraintes composée de points de cheminement, d'heures d'arrivée et d'orientation pour une trajectoire en arc. La trajectoire générée passe par les waypoints aux heures spécifiées avec l'orientation spécifiée. L' System object waypointTrajectory nécessite que l'orientation soit spécifiée à l'aide de quaternions ou de matrices de rotation. Convertissez les angles d'Euler enregistrés dans la matrice de contraintes en quaternions lors de la spécification de la propriété Orientation .
% Arrival, Waypoints, Orientation constraints = [0, 20,20,0, 90,0,0; 3, 50,20,0, 90,0,0; 4, 58,15.5,0, 162,0,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4), ... TimeOfArrival=constraints(:,1), ... Orientation=quaternion(constraints(:,5:7),"eulerd","ZYX","frame"));
Appelez waypointInfo sur trajectory pour renvoyer un tableau de vos contraintes spécifiées. Les propriétés de création Waypoints, TimeOfArrival et Orientation sont des variables de la table. Le tableau est pratique pour l’indexation lors du traçage.
tInfo = waypointInfo(trajectory)
tInfo =
4x3 table
TimeOfArrival Waypoints Orientation
_____________ ____________________ ________________
0 20 20 0 {1x1 quaternion}
3 50 20 0 {1x1 quaternion}
4 58 15.5 0 {1x1 quaternion}
5.5 59.5 0 0 {1x1 quaternion}
L'objet trajectoire génère la position, la vitesse, l'accélération et la vitesse angulaire actuelles à chaque appel. Appelez trajectory en boucle et tracez la position au fil du temps. Mettez en cache les autres sorties.
figure(1) plot(tInfo.Waypoints(1,1),tInfo.Waypoints(1,2),"b*") title("Position") axis([20,65,0,25]) xlabel("North") ylabel("East") grid on daspect([1 1 1]) hold on orient = zeros(tInfo.TimeOfArrival(end)*trajectory.SampleRate,1,"quaternion"); vel = zeros(tInfo.TimeOfArrival(end)*trajectory.SampleRate,3); acc = vel; angVel = vel; count = 1; while ~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); plot(pos(1),pos(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end
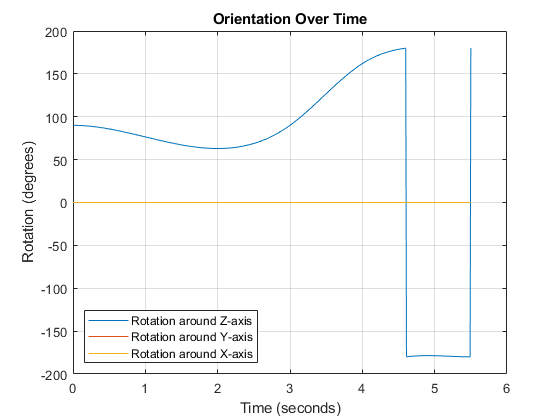
Inspectez l’orientation, la vitesse, l’accélération et la vitesse angulaire au fil du temps. L' System object™ waypointTrajectory crée un chemin à travers les contraintes spécifiées qui minimisent l'accélération et la vitesse angulaire.
figure(2)
timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end);
eulerAngles = eulerd([tInfo.Orientation{1};orient],"ZYX","frame");
plot(timeVector,eulerAngles(:,1), ...
timeVector,eulerAngles(:,2), ...
timeVector,eulerAngles(:,3));
title("Orientation Over Time")
legend("Rotation around Z-axis", ...
"Rotation around Y-axis", ...
"Rotation around X-axis", ...
"Location","southwest")
xlabel("Time (seconds)")
ylabel("Rotation (degrees)")
grid on
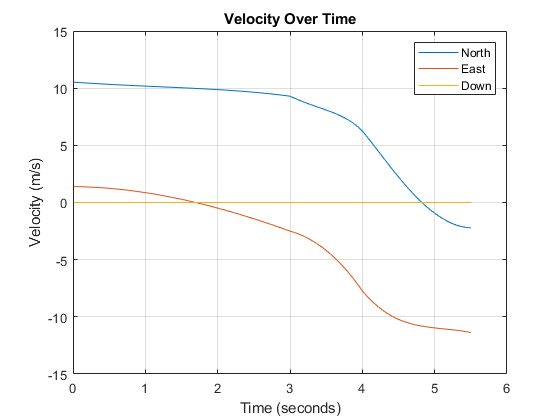
figure(3)
plot(timeVector(2:end),vel(:,1), ...
timeVector(2:end),vel(:,2), ...
timeVector(2:end),vel(:,3));
title("Velocity Over Time")
legend("North","East","Down")
xlabel("Time (seconds)")
ylabel("Velocity (m/s)")
grid on
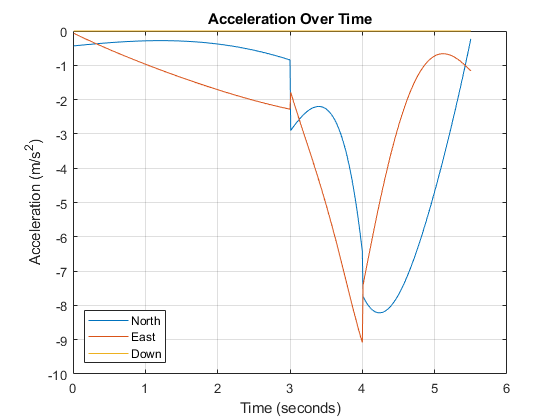
figure(4)
plot(timeVector(2:end),acc(:,1), ...
timeVector(2:end),acc(:,2), ...
timeVector(2:end),acc(:,3));
title("Acceleration Over Time")
legend("North","East","Down","Location","southwest")
xlabel("Time (seconds)")
ylabel("Acceleration (m/s^2)")
grid on
figure(5)
plot(timeVector(2:end),angVel(:,1), ...
timeVector(2:end),angVel(:,2), ...
timeVector(2:end),angVel(:,3));
title("Angular Velocity Over Time")
legend("North","East","Down")
xlabel("Time (seconds)")
ylabel("Angular Velocity (rad/s)")
grid on
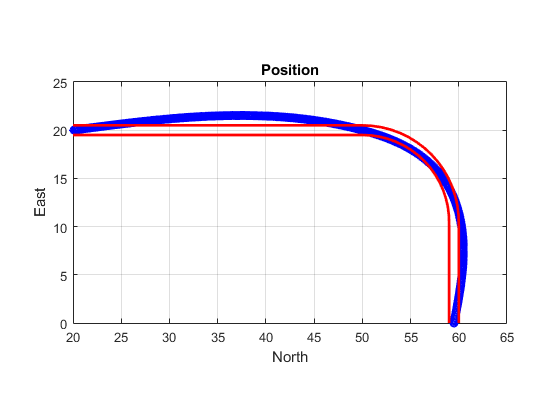
Restreindre la trajectoire de l'arc dans des limites prédéfinies
Vous pouvez spécifier des waypoints supplémentaires pour créer des trajectoires dans des limites données. Créez des limites supérieure et inférieure pour la trajectoire de l'arc.
figure(1) xUpperBound = [(20:50)';50+10*sin(0:0.1:pi/2)';60*ones(11,1)]; yUpperBound = [20.5.*ones(31,1);10.5+10*cos(0:0.1:pi/2)';(10:-1:0)']; xLowerBound = [(20:49)';50+9*sin(0:0.1:pi/2)';59*ones(11,1)]; yLowerBound = [19.5.*ones(30,1);10.5+9*cos(0:0.1:pi/2)';(10:-1:0)']; plot(xUpperBound,yUpperBound,"r","LineWidth",2); plot(xLowerBound,yLowerBound,"r","LineWidth",2)
Pour créer une trajectoire dans les limites, ajoutez des waypoints supplémentaires. Créez un nouveau waypointTrajectory System object™, puis appelez-le en boucle pour tracer la trajectoire générée. Mettez en cache l’orientation, la vitesse, l’accélération et la vitesse angulaire de l’objet trajectory .
% Time, Waypoint, Orientation constraints = [0, 20,20,0, 90,0,0; 1.5, 35,20,0, 90,0,0; 2.5 45,20,0, 90,0,0; 3, 50,20,0, 90,0,0; 3.3, 53,19.5,0, 108,0,0; 3.6, 55.5,18.25,0, 126,0,0; 3.9, 57.5,16,0, 144,0,0; 4.2, 59,14,0, 162,0,0; 4.5, 59.5,10,0 180,0,0; 5, 59.5,5,0 180,0,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4), ... TimeOfArrival=constraints(:,1), ... Orientation=quaternion(constraints(:,5:7),"eulerd","ZYX","frame")); tInfo = waypointInfo(trajectory); figure(1) plot(tInfo.Waypoints(1,1),tInfo.Waypoints(1,2),"b*") count = 1; while ~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); plot(pos(1),pos(2),"gd") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end
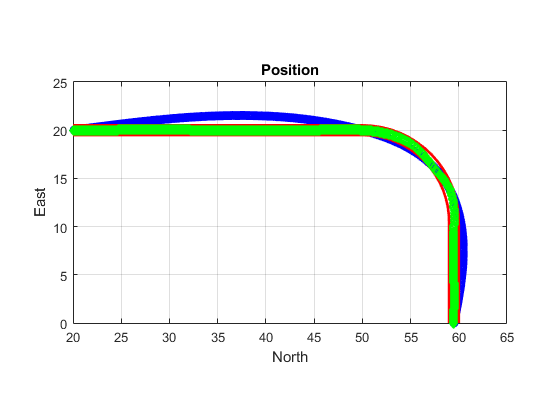
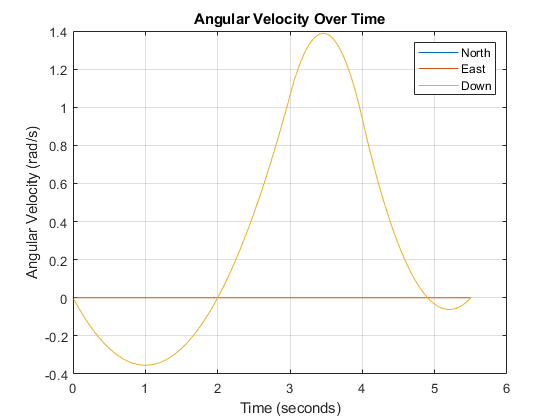
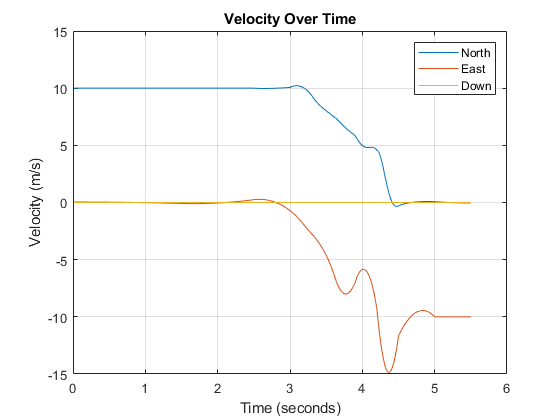
La trajectoire générée s'inscrit désormais dans les limites spécifiées. Visualisez l'orientation, la vitesse, l'accélération et la vitesse angulaire de la trajectoire générée.
figure(2) timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end); eulerAngles = eulerd(orient,"ZYX","frame"); plot(timeVector(2:end),eulerAngles(:,1), ... timeVector(2:end),eulerAngles(:,2), ... timeVector(2:end),eulerAngles(:,3)); title("Orientation Over Time") legend("Rotation around Z-axis", ... "Rotation around Y-axis", ... "Rotation around X-axis", ... "Location","southwest") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on figure(3) plot(timeVector(2:end),vel(:,1), ... timeVector(2:end),vel(:,2), ... timeVector(2:end),vel(:,3)); title("Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Velocity (m/s)") grid on figure(4) plot(timeVector(2:end),acc(:,1), ... timeVector(2:end),acc(:,2), ... timeVector(2:end),acc(:,3)); title("Acceleration Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Acceleration (m/s^2)") grid on figure(5) plot(timeVector(2:end),angVel(:,1), ... timeVector(2:end),angVel(:,2), ... timeVector(2:end),angVel(:,3)); title("Angular Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Angular Velocity (rad/s)") grid on


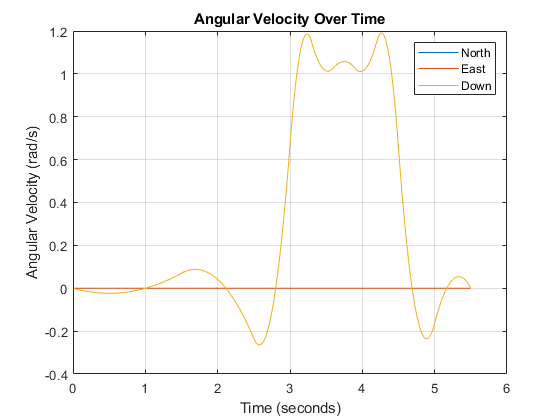
Notez que même si la trajectoire générée s'inscrit désormais dans les limites spatiales, l'accélération et la vitesse angulaire de la trajectoire sont quelque peu erratiques. Cela est dû à une trop grande spécification des waypoints.
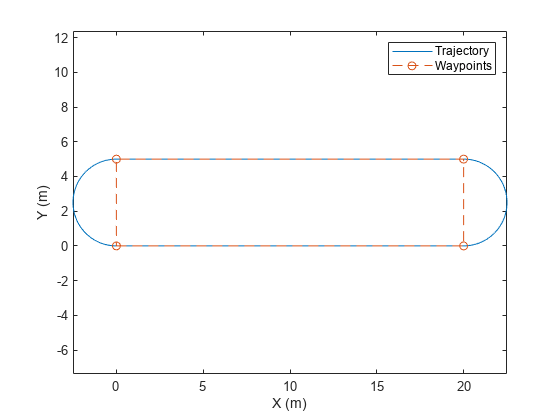
Considérons une trajectoire de piste de course comme suit.

Les quatre points d'angle de la trajectoire sont respectivement (0,0,0), (20,0,0), (20,5,0) et (0,5,0) en mètres. Par conséquent, spécifiez les waypoints d'une boucle comme suit :
wps = [0 0 0;
20 0 0;
20 5 0;
0 5 0;
0 0 0];Supposons que la trajectoire ait une vitesse constante de 2 m/s, et donc les vitesses aux cinq points de cheminement sont :
vels = [2 0 0;
2 0 0;
-2 0 0;
-2 0 0;
2 0 0];L’heure d’arrivée pour les cinq waypoints est :
t = cumsum([0 20/2 5*pi/2/2 20/2 5*pi/2/2]');
L'orientation de la trajectoire aux cinq waypoints est :
eulerAngs = [0 0 0;
0 0 0;
180 0 0;
180 0 0;
0 0 0]; % Angles in degrees.
% Convert Euler angles to quaternions.
quats = quaternion(eulerAngs,"eulerd","ZYX","frame");Spécifiez la fréquence d'échantillonnage sur 100 pour lisser les lignes de trajectoire.
fs = 100;
Construisez le waypointTrajectory.
traj = waypointTrajectory(wps,SampleRate=fs, ... Velocities=vels,... TimeOfArrival=t,... Orientation=quats);
Échantillonnez et tracez la trajectoire.
[pos, orient, vel, acc, angvel] = traj(); i = 1; spf = traj.SamplesPerFrame; while ~isDone(traj) idx = (i+1):(i+spf); [pos(idx,:), orient(idx,:), ... vel(idx,:), acc(idx,:), angvel(idx,:)] = traj(); i = i+spf; end
Tracez la trajectoire et les waypoints spécifiés.
plot(pos(:,1),pos(:,2), wps(:,1),wps(:,2), "--o") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Trajectory", "Waypoints"}) axis equal
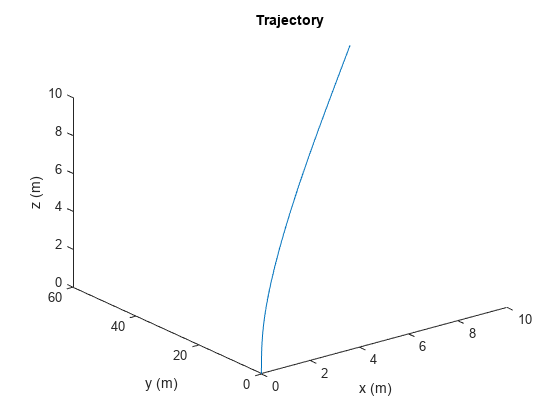
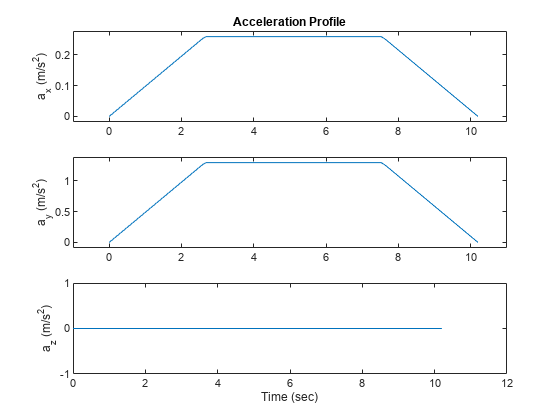
Créez un objet waypointTrajectory qui connecte deux waypoints. La vitesse de la trajectoire aux deux waypoints est 0et 10, respectivement. Limiter la limite d'à-coup à 0,5pour activer le profil d'accélération trapézoïdale.
waypoints = [0 0 0;
10 50 10];
speeds = [0 10];
jerkLimit = 0.5;
trajectory = waypointTrajectory(waypoints,GroundSpeed=speeds,JerkLimit=jerkLimit);Obtenez l'heure initiale et l'heure finale de la trajectoire en interrogeant la propriété TimeOfArrival . Créez des horodatages pour échantillonner la trajectoire.
t0 = trajectory.TimeOfArrival(1); tf = trajectory.TimeOfArrival(end); sampleTimes = linspace(t0,tf,100);
Obtenez les informations de position, de vitesse et d'accélération à ces horodatages échantillonnés à l'aide de la fonction objet lookupPose .
[position,~,velocity,acceleration,~] = lookupPose(trajectory,sampleTimes);
Tracez la trajectoire.
figure() plot3(position(:,1),position(:,2),position(:,3)) xlabel("x (m)") ylabel("y (m)") zlabel("z (m)") title("Trajectory")
Tracez le profil de vitesse.
figure() subplot(3,1,1) plot(sampleTimes,velocity(:,1)); ylabel("v_x (m/s)") title("Velocity Profile") subplot(3,1,2) plot(sampleTimes,velocity(:,2)); ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,velocity(:,3)); ylabel("v_z (m/s)") xlabel("Time (sec)")
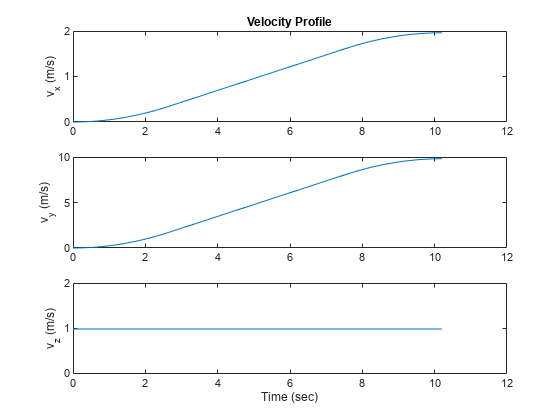
Tracez le profil d'accélération. D’après les résultats, le profil d’accélération du mouvement plan est trapézoïdal.
figure() subplot(3,1,1) plot(sampleTimes,acceleration(:,1)); axis padded ylabel("a_x (m/s^2)") title("Acceleration Profile") subplot(3,1,2) plot(sampleTimes,acceleration(:,2)); ylabel("a_y (m/s^2)") axis padded subplot(3,1,3) plot(sampleTimes,acceleration(:,3)); ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Algorithmes
L' System object waypointTrajectory définit une trajectoire qui passe en douceur par des waypoints. La trajectoire relie les points de cheminement via une interpolation qui suppose que la direction de la gravité exprimée dans le référentiel de trajectoire est constante. Généralement, vous pouvez utiliser waypointTrajectory pour modéliser les trajectoires d'une plate-forme ou d'un véhicule sur une distance de plusieurs centaines de kilomètres.
Le chemin planaire de la trajectoire (la projection x- y ) se compose de courbes Clothoïdes par morceaux. La courbure de la courbe entre deux waypoints consécutifs varie linéairement avec la longueur de la courbe qui les sépare. La direction tangente du chemin à chaque waypoint est choisie pour minimiser les discontinuités dans la courbure, sauf si le cap est spécifié explicitement via la propriété Course ou implicitement via la propriété Velocities. . Une fois le chemin établi, l'objet utilise l'interpolation cubique Hermite pour calculer l'emplacement du véhicule tout au long du chemin en fonction du temps et de la distance planaire parcourue. Si la propriété JerkLimit est spécifiée, les objets produisent un profil d'accélération trapézoïdale horizontale pour tout segment situé entre deux points de cheminement. Le profil d'accélération trapézoïdale se compose de trois sous-segments :
Un sous-segment de secousse d'ampleur constante
Un sous-segment d'accélération à magnitude constante
Un sous-segment de secousse d'ampleur constante
La composante normale (z-component) de la trajectoire est ensuite choisie pour satisfaire une spline par morceaux préservant la forme (PCHIP) à moins que le taux de montée ne soit spécifié explicitement via le ClimbRate ou la troisième colonne de la propriété Velocities . Choisissez le signe du taux de montée en fonction du ReferenceFrame sélectionné :
Lorsqu'un référentiel 'ENU' est sélectionné, la spécification d'un taux de montée positif entraîne une valeur croissante de z.
Lorsqu'un cadre de référence 'NED' est sélectionné, la spécification d'un taux de montée positif entraîne une valeur décroissante de z.
Vous pouvez définir l'orientation du véhicule sur le trajet de deux manières principales :
Si la propriété
Orientationest spécifiée, l'objet utilise une spline quaternion cubique par morceaux pour calculer l'orientation le long du chemin en fonction du temps.Si la propriété
Orientationn'est pas spécifiée, alors le lacet du véhicule est toujours aligné avec la trajectoire. Le roulis et le tangage sont alors régis par les valeurs de propriétéAutoBanketAutoPitch, respectivement.AutoBankAutoPitchDescription falsefalseLe véhicule est toujours de niveau (tangage et roulis nuls). Ceci est généralement utilisé pour les grands navires marins. falsetrueLe tangage du véhicule est aligné avec la trajectoire et son roulis est toujours nul. Ceci est généralement utilisé pour les véhicules terrestres. truefalseLe tangage et le roulis du véhicule sont choisis de manière à ce que son axe local z soit aligné avec l'accélération nette (y compris la gravité). Ceci est généralement utilisé pour les avions à voilure tournante. truetrueLe roulis du véhicule est choisi de manière à ce que son plan transversal local s'aligne avec l'accélération nette (y compris la gravité). L'inclinaison du véhicule est alignée avec le chemin. Ceci est généralement utilisé pour les véhicules à deux roues et les avions à voilure fixe.