perturbations
Perturbation définie sur l'objet
Syntaxe
Description
perturbs = perturbations(obj)perturbs, définies sur l'objet, obj. Le perturbs renvoyé répertorie toutes les propriétés perturbables. Si une propriété n'est pas perturbée, alors son Type correspondant est renvoyé sous la forme "Null" et son Value correspondant est renvoyé sous la forme {Null,Null}.
perturbs = perturbations(obj,property,'Selection',values,probabilities)property tiré d'un ensemble de values qui ont un probabilities correspondant.
perturbs = perturbations(obj,property,'TruncatedNormal',mean,deviation,lowerLimit,upperLimit)property tiré d'une distribution normale avec mean, standard deviation, limite inférieure et limite supérieure.
perturbs = perturbations(obj,property,'Custom',perturbFcn)perturbFcn, qui dessine la valeur de décalage de perturbation.
Exemples
Créez un objet waypointTrajectory .
traj = waypointTrajectory;
Affichez les propriétés de perturbation par défaut à l'aide de la méthode perturbations .
perturbs = perturbations(traj)
perturbs=2×3 table
Property Type Value
_______________ ______ __________________
"Waypoints" "None" {[NaN]} {[NaN]}
"TimeOfArrival" "None" {[NaN]} {[NaN]}
Créez un objet insSensor .
sensor = insSensor
sensor =
insSensor with properties:
MountingLocation: [0 0 0] m
RollAccuracy: 0.2 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: [1 1 1] m
VelocityAccuracy: 0.05 m/s
AccelerationAccuracy: 0 m/s²
AngularVelocityAccuracy: 0 deg/s
TimeInput: [1⨯1 logical]
RandomStream: 'Global stream'
Définissez la perturbation sur la propriété RollAccuracy comme trois valeurs avec chacune une possibilité égale.
values = {0.1 0.2 0.3}values=1×3 cell array
{[0.1000]} {[0.2000]} {[0.3000]}
probabilities = [1/3 1/3 1/3]
probabilities = 1×3
0.3333 0.3333 0.3333
perturbations(sensor,'RollAccuracy','Selection',values,probabilities)
ans=7×3 table
Property Type Value
_________________________ ___________ ______________________________________
"RollAccuracy" "Selection" {1x3 cell} {[0.3333 0.3333 0.3333]}
"PitchAccuracy" "None" {[ NaN]} {[ NaN]}
"YawAccuracy" "None" {[ NaN]} {[ NaN]}
"PositionAccuracy" "None" {[ NaN]} {[ NaN]}
"VelocityAccuracy" "None" {[ NaN]} {[ NaN]}
"AccelerationAccuracy" "None" {[ NaN]} {[ NaN]}
"AngularVelocityAccuracy" "None" {[ NaN]} {[ NaN]}
Perturbez l'objet sensor en utilisant la fonction perturber.
rng(2020) perturb(sensor); sensor
sensor =
insSensor with properties:
MountingLocation: [0 0 0] m
RollAccuracy: 0.5 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: [1 1 1] m
VelocityAccuracy: 0.05 m/s
AccelerationAccuracy: 0 m/s²
AngularVelocityAccuracy: 0 deg/s
TimeInput: [1⨯1 logical]
RandomStream: 'Global stream'
Le RollAccuracy est perturbé à 0.5 deg.
Définissez une trajectoire de waypoint. Par défaut, cette trajectoire contient deux waypoints.
traj = waypointTrajectory
traj =
waypointTrajectory with properties:
SampleRate: 100
SamplesPerFrame: 1
Waypoints: [2x3 double]
TimeOfArrival: [2x1 double]
Velocities: [2x3 double]
Course: [2x1 double]
GroundSpeed: [2x1 double]
ClimbRate: [2x1 double]
Orientation: [2x1 quaternion]
AutoPitch: 0
AutoBank: 0
ReferenceFrame: 'NED'
Définir les perturbations sur la propriété Waypoints et la propriété TimeOfArrival .
rng(2020); perturbs1 = perturbations(traj,'Waypoints','Normal',1,1)
perturbs1=2×3 table
Property Type Value
_______________ ________ __________________
"Waypoints" "Normal" {[ 1]} {[ 1]}
"TimeOfArrival" "None" {[NaN]} {[NaN]}
perturbs2 = perturbations(traj,'TimeOfArrival','Selection',{[0;1],[0;2]})
perturbs2=2×3 table
Property Type Value
_______________ ___________ _______________________________
"Waypoints" "Normal" {[ 1]} {[ 1]}
"TimeOfArrival" "Selection" {1x2 cell} {[0.5000 0.5000]}
Perturber la trajectoire.
offsets = perturb(traj)
offsets=2×1 struct array with fields:
Property
Offset
PerturbedValue
La propriété Waypoints et la propriété TimeOfArrival ont changé.
traj.Waypoints
ans = 2×3
1.8674 1.0203 0.7032
2.3154 -0.3207 0.0999
traj.TimeOfArrival
ans = 2×1
0
2
Créez un objet imuSensor et affichez ses propriétés perturbables.
imu = imuSensor; perturbations(imu)
ans=17×3 table
Property Type Value
______________________________________ ______ __________________
"Accelerometer.MeasurementRange" "None" {[NaN]} {[NaN]}
"Accelerometer.Resolution" "None" {[NaN]} {[NaN]}
"Accelerometer.ConstantBias" "None" {[NaN]} {[NaN]}
"Accelerometer.NoiseDensity" "None" {[NaN]} {[NaN]}
"Accelerometer.BiasInstability" "None" {[NaN]} {[NaN]}
"Accelerometer.RandomWalk" "None" {[NaN]} {[NaN]}
"Accelerometer.TemperatureBias" "None" {[NaN]} {[NaN]}
"Accelerometer.TemperatureScaleFactor" "None" {[NaN]} {[NaN]}
"Gyroscope.MeasurementRange" "None" {[NaN]} {[NaN]}
"Gyroscope.Resolution" "None" {[NaN]} {[NaN]}
"Gyroscope.ConstantBias" "None" {[NaN]} {[NaN]}
"Gyroscope.NoiseDensity" "None" {[NaN]} {[NaN]}
"Gyroscope.BiasInstability" "None" {[NaN]} {[NaN]}
"Gyroscope.RandomWalk" "None" {[NaN]} {[NaN]}
"Gyroscope.TemperatureBias" "None" {[NaN]} {[NaN]}
"Gyroscope.TemperatureScaleFactor" "None" {[NaN]} {[NaN]}
⋮
Spécifiez la perturbation pour la propriété NoiseDensity de l'accéléromètre sous forme de distribution uniforme.
perturbations(imu,'Accelerometer.NoiseDensity', ... 'Uniform',1e-5,1e-3);
Spécifiez la perturbation pour la propriété RandomWalk du gyroscope sous la forme d'une distribution normale tronquée.
perts = perturbations(imu,'Gyroscope.RandomWalk', ... 'TruncatedNormal',2,1e-5,0,Inf);
Chargez les données IMU préenregistrées.
load imuSensorData.mat
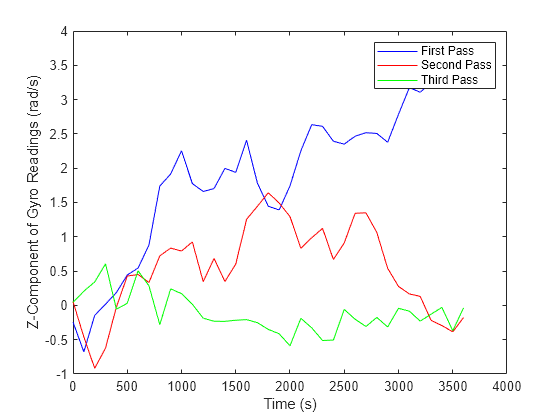
numSamples = size(orientations);Simulez le imuSensor trois fois avec différentes réalisations de perturbations.
rng(2021); % For repeatable results numRuns = 3; colors = ['b' 'r' 'g']; for idx = 1:numRuns % Clone IMU to maintain original values imuCopy = clone(imu); % Perturb noise values offsets = perturb(imuCopy); % Obtain the measurements [accelReadings,gyroReadings] = imuCopy(accelerations,angularVelocities,orientations); % Plot the results plot(times,gyroReadings(:,3),colors(idx)); hold on; end xlabel('Time (s)') ylabel('Z-Component of Gyro Readings (rad/s)') legend("First Pass","Second Pass","Third Pass"); hold off
Arguments d'entrée
Arguments de sortie
En savoir plus
Vous pouvez spécifier la distribution de la perturbation appliquée à une propriété spécifique.
Distribution de sélection — La fonction définit le décalage de perturbation comme l'une des valeurs spécifiées avec la probabilité associée. Par exemple, si vous spécifiez les valeurs sous la forme
[1 2]et les probabilités sous la forme[0.7 0.3], la fonctionperturbajoute une valeur de décalage de1à la propriété avec une probabilité de0.7et ajoutez une valeur de compensation de2à la propriété avec une probabilité de0.3. Utilisez la distribution de sélection lorsque vous souhaitez uniquement perturber la propriété avec un certain nombre de valeurs discrètes.Distribution normale — La fonction définit le décalage de perturbation comme une valeur tirée d'une distribution normale avec la moyenne et l'écart type spécifiés (ou covariance). La distribution normale est la distribution la plus couramment utilisée car elle imite la perturbation naturelle des paramètres dans la plupart des cas.
Distribution normale tronquée — La fonction définit le décalage de perturbation comme une valeur tirée d'une distribution normale tronquée avec la moyenne, l'écart type (ou covariance), la limite inférieure et la limite supérieure spécifiés. Contrairement à la distribution normale, les valeurs tirées d'une distribution normale tronquée sont tronquées par la limite inférieure et supérieure. Utilisez une distribution normale tronquée lorsque vous souhaitez appliquer une distribution normale, mais que les valeurs valides de la propriété sont confinées dans un intervalle.
Distribution uniforme — La fonction définit le décalage de perturbation comme une valeur tirée d'une distribution uniforme avec les valeurs minimales et maximales spécifiées. Toutes les valeurs de l'intervalle (spécifiées par les valeurs minimale et maximale) ont la même probabilité de réalisation.
Distribution personnalisée — Personnalisez votre propre fonction de perturbation. La fonction doit avoir cette syntaxe :
oùoffset = myfun(propVal)
propValest la valeur depropertyetoffsetest la compensation de perturbation pour la propriété.
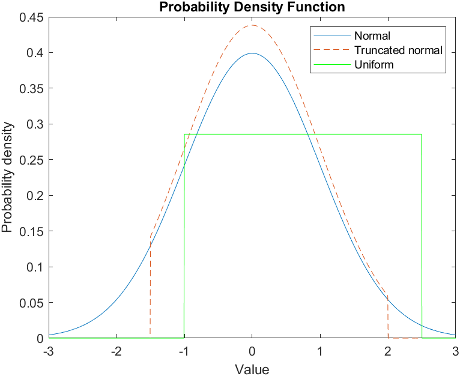
Cette figure montre les fonctions de densité de probabilité pour une distribution normale, une distribution normale tronquée et une distribution uniforme, respectivement.
Historique des versions
Introduit dans R2020b