metric
Syntaxe
Description
metricSummary = metric(plannerBM)
metricSummary = metric(plannerBM,metricName)
[ renvoie le tableau metricSummary,metricData] = metric(plannerBM)metricData avec les valeurs de métrique pour chaque exécution pour toutes les métriques et le tableau metricSummary avec le résumé de toutes les métriques.
[ renvoie le résumé et les valeurs d'une métrique spécifique.metricSummary,metricData] = metric(plannerBM,metricName)
Exemples
Créez une carte d'occupation à partir d'un exemple de carte.
load("exampleMaps.mat","simpleMap"); map = occupancyMap(simpleMap);
Créez un validateur d'état avec stateSpaceSE2 en utilisant la carte.
sv = validatorOccupancyMap(stateSpaceSE2,Map=map);
Spécifiez les états de départ et d’objectif.
start = [5 8 pi/2]; goal = [7 18 pi/2];
Créez un objet plannerBenchmark .
pbo = plannerBenchmark(sv,start,goal);
Définissez les handles de fonction pour les fonctions d'initialisation des planificateurs.
plannerHAFcn = @(sv)plannerHybridAStar(sv); plannerRRTSFcn = @(sv)plannerRRTStar(sv.StateSpace,sv);
Définissez le handle de fonction pour la fonction de plan, qui est commun aux deux planificateurs.
plnFcn = @(initOut,s,g)plan(initOut,s,g);
Ajoutez les planificateurs de chemin pour l’analyse comparative.
addPlanner(pbo,plnFcn,plannerHAFcn);
addPlanner(pbo,plnFcn,plannerRRTSFcn,PlannerName="ppRRTStar");Définissez le rng pour des résultats répétitifs.
rng('default')Exécutez les planificateurs de chemin le nombre de fois spécifié dans runCount pour collecter des métriques.
runCount = 5; runPlanner(pbo,runCount)
Initializing plannerHAFcn_plnFcn ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using plannerHAFcn_plnFcn. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5. Initializing ppRRTStar ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using ppRRTStar. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5.
Métrique de longueur de chemin d’accès pour toutes les exécutions sur l’environnement.
[pLenSummary,pLenData] = metric(pbo,"pathLength")pLenSummary=2×4 table
Mean Median StdDev sampleSize
______ ______ _______ __________
plannerHAFcn_plnFcn 10.349 10.349 0 5
ppRRTStar 12.84 12.9 0.67112 5
pLenData=2×5 table
Run1 Run2 Run3 Run4 Run5
______ ______ ______ ______ ______
plannerHAFcn_plnFcn 10.349 10.349 10.349 10.349 10.349
ppRRTStar 13.8 12.9 12.2 12 13.3
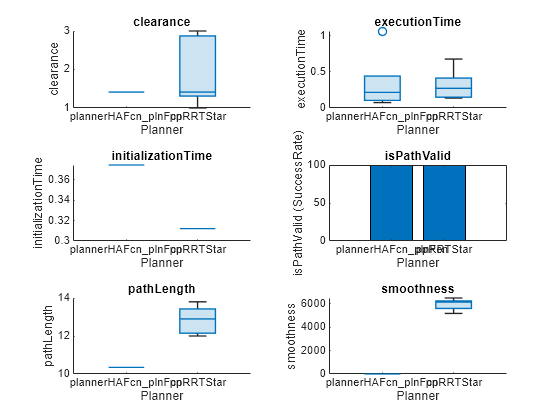
Visualisez toutes les mesures.
show(pbo)
Inspectez attentivement la métrique de dégagement.
figure
show(pbo,"clearance")
Arguments d'entrée
Arguments de sortie
Conseils
Si la valeur de la métrique ne peut pas être calculée en raison d'états vides dans la sortie du chemin ou d'une erreur lors de l'exécution de la fonction de plan,
NaNsera affiché pour les valeurs correspondantes dans les tableaux de données métriques. La fonction show n'affichera aucune valeur pour les métriques avec la valeurNaN.Si la sortie du chemin est
navPath, les métriques sont calculées à l'aide de l'espace d'état dansnavPath.Si la sortie du chemin est une matrice m-by-2, l'espace d'état est supposé comme
stateSpaceSE2avec thêta comme0pour toutes les poses. .Si la sortie du chemin est une matrice m-by-3, la troisième colonne de la sortie du chemin est supposée comme thêta et par la suite
stateSpaceSE2est supposée comme l'espace d'état.Si l'environnement est
validatorOccupancyMap, la métriqueisPathValidest calculée à l'aide de l'environnement spécifié.Si l'environnement est
occupancyMapoubinaryOccupancyMap, levalidatorOccupancyMappar défaut est créé en utilisant l'environnement spécifié car la carte et l'espace d'état sont dérivés comme ci-dessus.La valeur de la propriété
ValidationDistanceest supposée être0.1*(1/resolution of map).
Historique des versions
Introduit dans R2022a