plannerBenchmark
Planificateurs de parcours de référence à l'aide des métriques générées
Depuis R2022a
Description
L'objet plannerBenchmark évalue les planificateurs de chemin 2D en les exécutant sur un environnement spécifié avec des poses de départ et d'objectif spécifiées.
L'objet plannerBenchmark calcule les métriques suivantes :
clearance— Distance minimale aux obstacles dans l'environnementexecutionTime— Temps nécessaire à l'exécution de la fonction de planinitializationTime— Temps nécessaire à l'exécution de la fonction d'initialisationisPathValid— Si vrai, cela représente le chemin existant et sans collisionpathLength— Longueur du chemin générésmoothness— Fluidité du parcours pour toutes les poses
Les métriques telles que executionTime et initializationTime sont calculées lors de l'exécution des planificateurs. Les métriques telles que clearance, isPathValid, pathLength et smoothness sont calculées à partir des sorties de chemin résultantes. après avoir exécuté les planificateurs. Les mesures calculées sont résumées statistiquement sous forme de tableau et peuvent être visualisées sous forme de graphiques.
Création
Description
plannerBM = plannerBenchmark(environment,start,goal)plannerBenchmark avec les objets environment, start et goal pose. Les entrées environment, start et goal définissent les Environment, Start Propriétés $ et Goal , respectivement.
Propriétés
Fonctions d'objet
addPlanner | Ajouter un planificateur de chemin pour l'analyse comparative |
copy | Créer une copie complète de l'objet PlannerBenchmark |
metric | Retourner les métriques du planificateur de chemin |
report | Créer un rapport de référence |
runPlanner | Planificateurs de parcours |
show | Visualize path planner metrics |
Exemples
Créez une carte d'occupation à partir d'un exemple de carte.
load("exampleMaps.mat","simpleMap"); map = occupancyMap(simpleMap);
Créez un validateur d'état avec stateSpaceSE2 en utilisant la carte.
sv = validatorOccupancyMap(stateSpaceSE2,Map=map);
Spécifiez les états de départ et d’objectif.
start = [5 8 pi/2]; goal = [7 18 pi/2];
Créez un objet plannerBenchmark .
pbo = plannerBenchmark(sv,start,goal);
Définissez les handles de fonction pour les fonctions d'initialisation des planificateurs.
plannerHAFcn = @(sv)plannerHybridAStar(sv); plannerRRTSFcn = @(sv)plannerRRTStar(sv.StateSpace,sv);
Définissez le handle de fonction pour la fonction de plan, qui est commun aux deux planificateurs.
plnFcn = @(initOut,s,g)plan(initOut,s,g);
Ajoutez les planificateurs de chemin pour l’analyse comparative.
addPlanner(pbo,plnFcn,plannerHAFcn);
addPlanner(pbo,plnFcn,plannerRRTSFcn,PlannerName="ppRRTStar");Définissez le rng pour des résultats répétitifs.
rng('default')Exécutez les planificateurs de chemin le nombre de fois spécifié dans runCount pour collecter des métriques.
runCount = 5; runPlanner(pbo,runCount)
Initializing plannerHAFcn_plnFcn ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using plannerHAFcn_plnFcn. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5. Initializing ppRRTStar ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using ppRRTStar. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5.
Métrique de longueur de chemin d’accès pour toutes les exécutions sur l’environnement.
[pLenSummary,pLenData] = metric(pbo,"pathLength")pLenSummary=2×4 table
Mean Median StdDev sampleSize
______ ______ _______ __________
plannerHAFcn_plnFcn 10.349 10.349 0 5
ppRRTStar 12.84 12.9 0.67112 5
pLenData=2×5 table
Run1 Run2 Run3 Run4 Run5
______ ______ ______ ______ ______
plannerHAFcn_plnFcn 10.349 10.349 10.349 10.349 10.349
ppRRTStar 13.8 12.9 12.2 12 13.3
Visualisez toutes les mesures.
show(pbo)
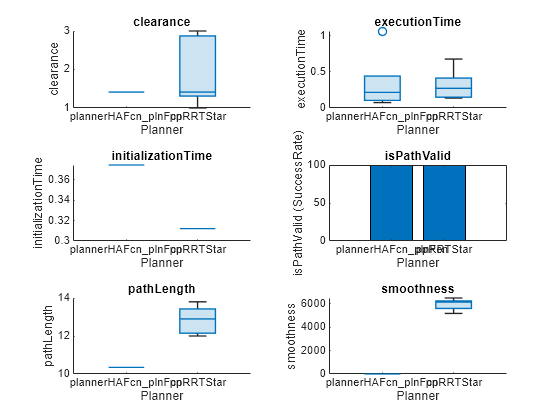
Inspectez attentivement la métrique de dégagement.
figure
show(pbo,"clearance")
Historique des versions
Introduit dans R2022a