runPlanner
Description
runPlanner( exécute tous les planificateurs de chemin une fois.plannerBM)
runPlanner( spécifie le nombre de fois où exécuter tous les planificateurs de chemin. La fonction collecte les sorties de la fonction d'initialisation et de la fonction de plan. La fonction calcule également la métrique plannerBM,runCount)executionTime pour la fonction de plan et la métrique initializationTime pour la fonction d'initialisation.
runPlanner(___,Verbose=Value) spécifie verbeux qui affiche la progression de la fonction. La valeur de verbose est spécifiée comme "on" ou "off". La valeur par défaut de verbose est "on".
Exemples
Créez une carte d'occupation à partir d'un exemple de carte.
load("exampleMaps.mat","simpleMap"); map = occupancyMap(simpleMap);
Créez un validateur d'état avec stateSpaceSE2 en utilisant la carte.
sv = validatorOccupancyMap(stateSpaceSE2,Map=map);
Spécifiez les états de départ et d’objectif.
start = [5 8 pi/2]; goal = [7 18 pi/2];
Créez un objet plannerBenchmark .
pbo = plannerBenchmark(sv,start,goal);
Définissez les handles de fonction pour les fonctions d'initialisation des planificateurs.
plannerHAFcn = @(sv)plannerHybridAStar(sv); plannerRRTSFcn = @(sv)plannerRRTStar(sv.StateSpace,sv);
Définissez le handle de fonction pour la fonction de plan, qui est commun aux deux planificateurs.
plnFcn = @(initOut,s,g)plan(initOut,s,g);
Ajoutez les planificateurs de chemin pour l’analyse comparative.
addPlanner(pbo,plnFcn,plannerHAFcn);
addPlanner(pbo,plnFcn,plannerRRTSFcn,PlannerName="ppRRTStar");Définissez le rng pour des résultats répétitifs.
rng('default')Exécutez les planificateurs de chemin le nombre de fois spécifié dans runCount pour collecter des métriques.
runCount = 5; runPlanner(pbo,runCount)
Initializing plannerHAFcn_plnFcn ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using plannerHAFcn_plnFcn. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5. Initializing ppRRTStar ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using ppRRTStar. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5.
Métrique de longueur de chemin d’accès pour toutes les exécutions sur l’environnement.
[pLenSummary,pLenData] = metric(pbo,"pathLength")pLenSummary=2×4 table
Mean Median StdDev sampleSize
______ ______ _______ __________
plannerHAFcn_plnFcn 10.349 10.349 0 5
ppRRTStar 12.84 12.9 0.67112 5
pLenData=2×5 table
Run1 Run2 Run3 Run4 Run5
______ ______ ______ ______ ______
plannerHAFcn_plnFcn 10.349 10.349 10.349 10.349 10.349
ppRRTStar 13.8 12.9 12.2 12 13.3
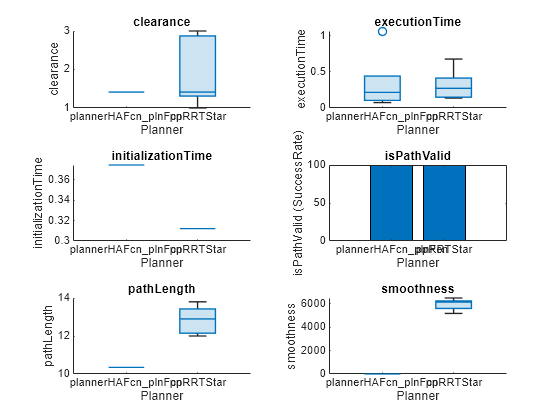
Visualisez toutes les mesures.
show(pbo)
Inspectez attentivement la métrique de dégagement.
figure
show(pbo,"clearance")
Arguments d'entrée
Historique des versions
Introduit dans R2022a