plannerControlRRT
Description
L'objet plannerControlRRT est un planificateur d'arbre aléatoire à exploration rapide (RRT) pour résoudre des problèmes de planification cinématique et dynamique (kinodynamique) à l'aide de contrôles. L'algorithme RRT est une routine de planification de mouvement basée sur un arbre qui développe progressivement un arbre de recherche. Dans les planificateurs cinématiques, l'arbre se développe en échantillonnant aléatoirement les états dans l'espace de configuration du système, puis tente de propager le nœud le plus proche vers cet état. Le propagateur d'état échantillonne les commandes permettant d'atteindre l'état sur la base du modèle cinématique et des politiques de commande. Au fur et à mesure que l'arborescence ajoute des nœuds, les états échantillonnés s'étendent sur l'espace de recherche et connectent finalement les états de départ et d'objectif.
Voici les étapes de l'algorithme RRT basé sur le contrôle :
Le planificateur,
plannerControlRRT, demande un état à l'espace d'état.Le planificateur trouve l'état le plus proche dans l'arborescence de recherche en fonction du coût.
Le propagateur d'état,
mobileRobotPropagator, échantillonne les commandes de contrôle et les durées à propager vers l'état cible.Le propagateur d'état se propage vers l'état cible.
Si le propagateur renvoie une trajectoire valide vers l'état, ajoutez l'état à l'arborescence.
"Facultatif": Tentative d'orienter la trajectoire vers l'objectif final en fonction des propriétés NumGoalExtension et GoalBias .
Continuez la recherche jusqu'à ce que l'arborescence de recherche atteigne l'objectif ou satisfasse à d'autres critères de sortie.
L'avantage d'un planificateur kinodynamique comme plannerControlRRT est qu'il est garanti de renvoyer une séquence d'états, de commandes et de références qui comprennent un chemin cinématiquement ou dynamiquement réalisable. L'inconvénient d'un planificateur kinodynamique est que les propagations cinématiques ne peuvent garantir que les nouveaux états sont exactement égaux aux états cibles à moins qu'il n'existe une représentation analytique d'une séquence de commandes qui pilotent le système entre deux configurations avec une erreur résiduelle nulle. Cela signifie que les planificateurs kinodynamiques sont généralement asymptotiquement complets et garantissent la faisabilité cinématique, mais ne peuvent souvent pas garantir l'optimalité asymptotique.
Création
Syntaxe
Description
controlPlanner = plannerControlRRT(propagator)StatePropagator .
controlPlanner = plannerControlRRT(propagator,Name=Value)plannerControlRRT(propagator,ContinueAfterGoalReached=1) continue de rechercher des chemins alternatifs une fois que l'arbre a atteint l'objectif.
Propriétés
Fonctions d'objet
Exemples
Planifiez des trajectoires de contrôle pour un modèle cinématique de vélo avec l'objet mobileRobotPropagator . Spécifiez une carte pour l'environnement, définissez des limites d'état et définissez un emplacement de départ et un emplacement objectif. Planifiez un chemin à l'aide de l'algorithme RRT basé sur le contrôle, qui utilise un propagateur d'état pour planifier le mouvement et les commandes de contrôle requises.
Définir les paramètres d'état et de propagateur d'état
Chargez une matrice de carte ternaire et créez un objet occupancyMap . Créez le propagateur d'état à l'aide de la carte. Par défaut, le propagateur d'état utilise un modèle cinématique de vélo.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Définissez les limites d'état sur l'espace d'état en fonction des limites du monde cartographique.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Planifier le chemin
Créez le planificateur de chemin à partir du propagateur d'état.
planner = plannerControlRRT(propagator);
Spécifiez les états de départ et d’objectif.
start = [10 15 0]; goal = [40 30 0];
Planifiez un chemin entre les États. Pour des résultats reproductibles, réinitialisez le générateur de nombres aléatoires avant de planifier. La fonction plan génère un objet navPathControl , qui contient les états, les commandes de contrôle et les durées.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1x1 mobileRobotPropagator]
States: [192x3 double]
Controls: [191x2 double]
Durations: [191x1 double]
TargetStates: [191x3 double]
NumStates: 192
NumSegments: 191
Visualisez les résultats
Visualisez la carte et tracez les états du chemin.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](plankinodynamicpathwithcontrolsformobilerobotexample_01_fr.png)
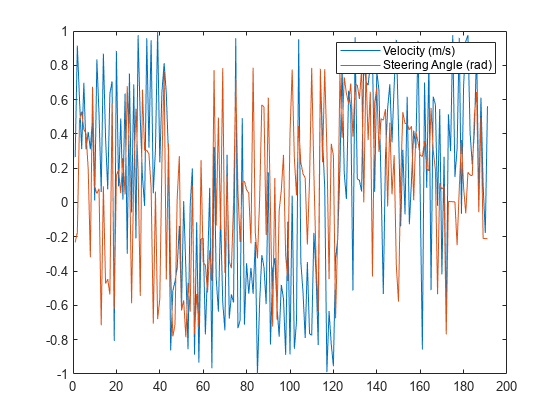
Affichez les entrées de contrôle [v psi] de la vitesse d'avancement et de l'angle de braquage.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Références
[1] S.M. Lavalle, J.J. Kuffner, "Randomized kinodynamic planning", International Journal of Robotics Research, vol. 20, no. 5, pp. 378-400, May 2001
[2] Kavraki, L. and S. LaValle. "Chapter 5 Motion Planning", 1st ed., B. Siciliano et O. Khatib, Ed. New York: Springer-Verlag Berlin Heidelberg, 2008, pp. 109-131.
Capacités étendues
Historique des versions
Introduit dans R2021b