plan
Planifier un chemin cinématiquement réalisable entre deux états
Depuis R2021b
Syntaxe
Description
path = plan(planner,startState,goalState)startState et goalState.
La planification est réalisée sur la base du propagateur d'état, qui exploite un modèle cinématique et des contrôleurs du système pour rechercher l'espace de configuration. Le planificateur renvoie un objet navPathControl , path, qui contient le propagateur utilisé lors de la planification et une séquence d'états, de contrôles, d'états cibles et de durées de contrôle.
[___, renvoie également les informations de solution solutionInfo] = plan(planner,startState,goalState)solutionInfo de la planification du chemin.
[___] = plan( prend un handle de fonction qui produit une configuration d'objectif lorsqu'il est appelé. Le handle de fonction ne doit prendre aucune entrée et générer un état d'objectif dont la taille correspond à planner,startState,goalSampleFcn)startState.
Exemples
Planifiez des trajectoires de contrôle pour un modèle cinématique de vélo avec l'objet mobileRobotPropagator . Spécifiez une carte pour l'environnement, définissez des limites d'état et définissez un emplacement de départ et un emplacement objectif. Planifiez un chemin à l'aide de l'algorithme RRT basé sur le contrôle, qui utilise un propagateur d'état pour planifier le mouvement et les commandes de contrôle requises.
Définir les paramètres d'état et de propagateur d'état
Chargez une matrice de carte ternaire et créez un objet occupancyMap . Créez le propagateur d'état à l'aide de la carte. Par défaut, le propagateur d'état utilise un modèle cinématique de vélo.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Définissez les limites d'état sur l'espace d'état en fonction des limites du monde cartographique.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Planifier le chemin
Créez le planificateur de chemin à partir du propagateur d'état.
planner = plannerControlRRT(propagator);
Spécifiez les états de départ et d’objectif.
start = [10 15 0]; goal = [40 30 0];
Planifiez un chemin entre les États. Pour des résultats reproductibles, réinitialisez le générateur de nombres aléatoires avant de planifier. La fonction plan génère un objet navPathControl , qui contient les états, les commandes de contrôle et les durées.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1x1 mobileRobotPropagator]
States: [192x3 double]
Controls: [191x2 double]
Durations: [191x1 double]
TargetStates: [191x3 double]
NumStates: 192
NumSegments: 191
Visualisez les résultats
Visualisez la carte et tracez les états du chemin.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](plankinodynamicpathwithcontrolsformobilerobotexample_01_fr.png)
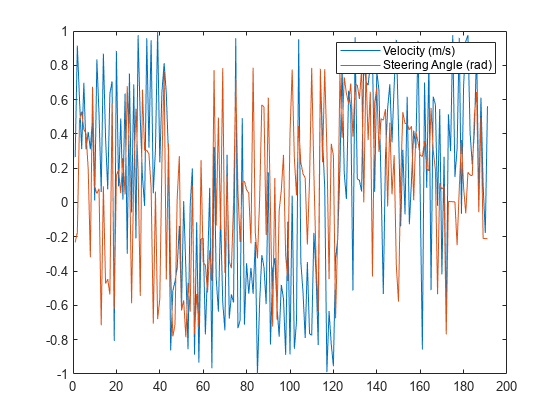
Affichez les entrées de contrôle [v psi] de la vitesse d'avancement et de l'angle de braquage.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2021b