Simulation temps réel Simscape
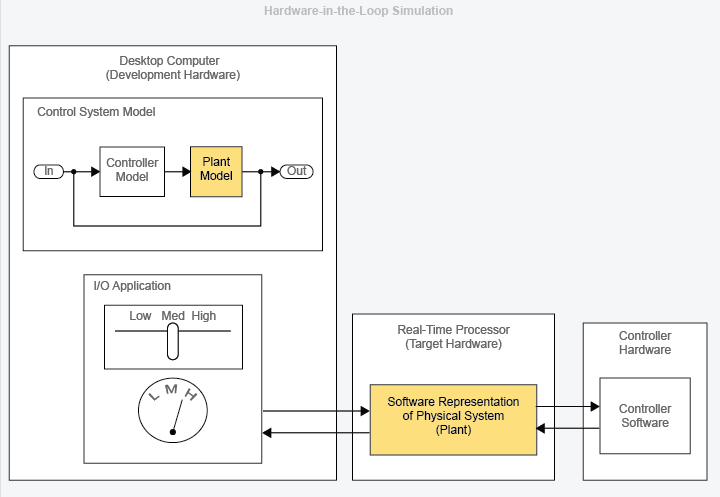
Vous pouvez utiliser un modèle Simscape comme modèle de système physique pour des tests Hardware-in-the-Loop (HIL). Lorsque vous préparez un modèle pour des tests HIL, vous lui apportez des modifications pour trouver le juste équilibre entre performances et fidélité jusqu’à ce qu’il puisse s’exécuter en temps réel sur le hardware cible. Sur un ordinateur de bureau, vous pouvez utiliser Simscape pour développer votre modèle de système physique et l’intégrer à votre modèle de contrôleur. Une fois que le modèle est prêt pour une exécution temps réel et que le hardware et le software de votre contrôleur sont disponibles, vous déployez le modèle de système physique sur une machine cible temps réel. La figure illustre le processus de simulation HIL.
Pour les applications nécessitant des pas de temps inférieurs à ceux que le CPU cible peut simuler, vous pouvez déployer votre modèle sur un FPGA monté sur la cible temps réel avec HDL Coder™. Lorsque votre modèle est prêt pour la cible temps réel, vous pouvez utiliser Simulink® Real-Time™ pour le déployer.
Catégories
- Préparation d’un modèle temps réel
Obtenir les résultats de référence et optimiser la performance
- Génération de code HDL pour FPGA
Générer du code HDL à partir de modèles Simscape pour un déploiement temps réel sur FPGA
- Déploiement temps réel
Workflow de simulation Hardware-in-the-Loop, interface hardware hôte-cible et paramètres run-time