MATLAB and Simulink utilities for vehicle kinematics, visualization, and sensor simulation.
This toolbox provides utilities for robot simulation and algorithm development. This includes:- 2D kinematic models for robot geometries such as differential drive, three, and four-wheeled vehicles

High-fidelity digital twins of Quanser’s world renowned controls, mechatronics, and robotics hardware for teaching and research.
campus.Getting StartedIf you have a MathWorks Campus-Wide License, you can gain access to the QLabs Virtual QUBE-Servo 2 DC Motor virtual experiment for free. If you are a member of a QLabs subscription for a
Beats MATLAB 300% - 400% in some cases ... really!
MTIMESX is a fast general purpose matrix and scalar multiply routine that has the following features:- Supports multi-dimensional (nD, n>2) arrays directly- Supports Transpose, Conjugate Transpose
MatLab object for segmenting sequences of real-valued data with noise, outliers and missing values.

HandsOn-SEA is a low cost robotic device enabling the students to interact with virtual environments
Example files for MATLAB and Simulink Robotics Arena walking robot videos.
Example files for the MATLAB and Simulink Robotics Arena videos and blog posts on walking robots.Refer to the GitHub page for more information and links, as well as to download older releases of this
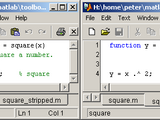
A small collection of utilities for stripping MATLAB comments from strings and files.

Mobile Robotics Training library and Simulation Map Generator app for the training video series.
Find videos showing how to use this toolbox here:https://www.mathworks.com/videos/series/student-competition-mobile-robotics-training.html>> Use the Simulation Map Generator App to import
MatLab object for clustering real-valued data with noise, outliers and missing values

MATLAB and Simulink Robotics Arena: Simulating Quadcopter Missions
Version 1.6.1.1
MathWorks Student Competitions TeamFiles used in the MATLAB & Simulink Robotics Arena : Simulating Quadcopter Missions video
quadcopter model in Gazebo over ROS using blocks from the Robotics Systems Toolbox.The video using these files can be found here :

MATLAB app for mobile robotics applications with ROS.
This entry contains the MATLAB app installer for the "MATLAB Apps with ROS" episode of the MATLAB and Simulink Robotics

3D rigid transforms and robotics with quaternions and dual quaternions (OO interface)
to their corresponding rotation matrixes (returned in a 3x3x8x7x6 array) with just one call to quat2rot. Get started: demo_conversions3x3 demo_conversions4x4- Robot kinematics. This
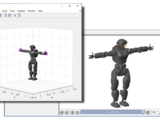
Robot model library to visualize and simulate robots with MATLAB and Simulink
The Robotics System Toolbox™ Robot Library Data Support Package enables users to utilize Robot Library robot models in Simscape Multibody™ and external simulators. This support package provides

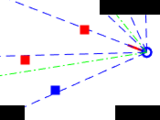
MATLAB and Simulink Robotics Arena: Direction of Arrival Estimation with MATLAB
Version 1.0
Stephen CroninMATLAB and Simulink Robotics Arena: Direction of Arrival Estimation with MATLAB Supporting Files
This entry contains all files used in the MATLAB & Simulink Robotics Arena : Direction of Arrival with MATLAB video. This includes: Files - Folder with MATLAB code used in the Demo Hydrophone
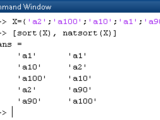
Alphanumeric sort of a cell/string/categorical array, with customizable number format.
NATSORTROWS:http://www.mathworks.com/matlabcentral/fileexchange/47433-natural-order-row-sortSummaryAlphanumeric sort the text in a string/cell/categorical array. Sorts the text by character code taking into account the values of any number substrings. Compare for example:X = {'a2', 'a10', 'a1'}; sort(X) ans =
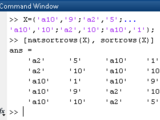
Alphanumeric row sort of a cell/string/categorical/table array, with customizable number format.
{'x2','10';'x10','0';'x1','0';'x2','2'};>> sortrows(X) % Wrong numeric orderans = 'x1' '0' 'x10' '0' 'x2' '10' 'x2' '2'>> natsortrows(X) % Correct numeric orderans = 'x1' '0' 'x2' '2' 'x2
All files related to Student Competition - Mobile Robotics Training video series.
for the online training: Student Competition - Mobile Robotics Training. Mobile Robotics Training Video Series: Part 1: Controlling Robot Motion Part 2: Using PID Controllers Part 3: Line Following

LEGO MINDSTORMS EV3 supplement to the Student Competition Mobile Robotics Training
This submission contains LEGO MINDSTORMS EV3 supplemental files to the Mobile Robotics Training. This training is available for student competition participants at the following
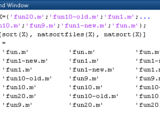
Alphanumeric sort of filenames or filepaths, with customizable number format.
account the values of any number substrings. Compare for example:>> A = {'a2.txt', 'a10.txt', 'a1.txt'};>> sort(A)ans = 'a1.txt' 'a10.txt' 'a2.txt'>> natsortfiles(A)ans = 'a1.txt
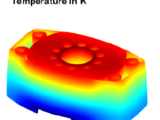
Heat conduction in a magnesium robotics component with finite element analysis (FEA).
This finite element thermal analysis (FEA) examines the heat tolerance for a robotics component. A single domain heat conduction analysis is performed on the nearest robotic component to the heat
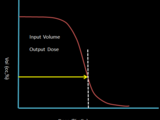
The purpose of this code is to compute a specific Dose metric given a DVH with relative dose and relative volume.
*Let me know if you enjoy the code or there is something that needs to be modified*Read the DVH and compute the dose metric (V2%, D98%, D3cc, D98%, D97% and even the Mean lung dose...). The DVH needs

Some codes to solve robotics equations
Some codes to solve robotics equations for Robotics Course at the University of Jordan
Robotics Inverse Kinematics Subproblems 0 to 2
Robotics Inverse Kinematics Subproblems 0 to 2
The kinematics toolbox is intended for prototyping robotics and computer vision related tasks.
Much of this library was written as I was learning how to use twists for rigid-body computer vision applications as opposed to traditional robotics (e.g. DH parameters and quaternions). My hope is

Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators
MathWorks Robotics and Autonomous Systems TeamConnect and control Universal Robots UR Series manipulators using MATLAB and Simulink
MATLAB based ROS and ROS 2 interface with the Universal Robots ROS Driver package (ROS Driver and ROS 2 Driver)Enable External Control over ROS using MathWorks provided “MATLAB URCap for External
Hands-on workshop on learning how to develop AI-based autonomous mobile robot
This material outlines a hands-on workshop on learning how to develop AI-based autonomous mobile robot for university students and engineers of all skill levels. MATLAB and Simulink are utilized as
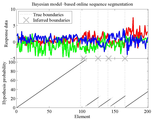
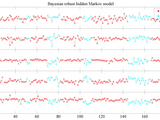
Bayesian algorithm for segmenting real-valued input-output data into non-overlapping segments
Find template Itm in the canny edge image of image Is.

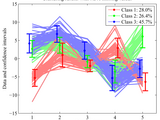
This function visualizes raw (grouped) data along with the mean, 95% confidence interval, and 1 SD.

The demo files for "What's New for Robotics" Japanese Webinar
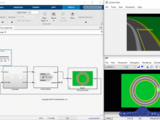
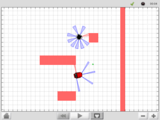
This zip file includes the demo files as follows for the Japanese webinar "What's New for Robotics". Occupancy grid map from range sensor dataPath planning in an environment with PRMControlling a
A framework which will teach basics of robotics such as Kinematics and Trajectory planning both by s
This work has been aimed at studying the kinematics of the Rhino Xr-3 robot and teaching the beginners in robotics to achieve specific tasks in real-time using the same. Previous work done

A collection of robot models and environments for mobile robotics and manipulation.
Contains kinematic and dynamic models for simplified robot models (differential drive, bicyle, car models and a block gripper) and commercial robots (VEX Clawbot, Turtlebot3 Waffle Pi, Universalis

this code draws 16 robot that the user select. the original drawings were made using ProE.
this code draws 16 robot that the user select. the original drawings were made using ProE. matlab converts it to faces and parts and assemble the robot. the user write robotics in matlab and the
Matlab implementation of an MMSE based noise PSD tracking algorithm for speech enhancement.

This program allows the conversion from atomic/weight % to weight/atomic % quantities of a system of up to 10 elements.
Step 1: select the elements that make up the system (up to 10)Step 2: input the atomic % (at%) of weight % (wt%) known values.Step 3: click on the 'To at%' or 'To wt%' to convert. The equations used
% Read the image img = imread('C:\Program Files (x86)\IMG-20240221-WA0003.jpg'); % Convert the image to grayscale if it's a color image if
% Read the imageimg = imread('C:\Program Files (x86)\IMG-20240221-WA0003.jpg');% Convert the image to grayscale if it's a color imageif size(img, 3) == 3 img_gray = rgb2gray(img);else img_gray
Add a percent ("%") symbol to the x, y, or both axes

It calculates the % attendace of the 6 students at a time.
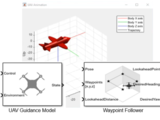
Algorithms to simulate Unmanned Aerial Vehicles (UAVs) and connect to hardware
vehicles (UAVs) can be modeled and controlled using UAV Library for Robotics System Toolbox™ functions, objects, and blocks. You can simulate a reduced-order guidance model for fixed-wing and multi-rotor
This toolbox is a collection of Simulink virtual envrionments designed to aid in the teaching of basic concepts in mobile robotics
Library of virtual envrionments designed to aid in the teaching of basic concepts in robotics along with re-usable lessons and other robotics demos. MATLAB APP available through the app menu after
A MATLAB-based educational bridge between theory and practice in robotics.
Sim.I.am is a robotics simulator that can be used to learn how to apply controls to mobile robots.The app is a demo of a multi-agent application, where one robot follows the other robot through a

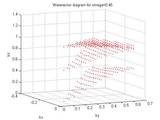
Solves the eigenproblem kz(omega,kx,ky) and plots the field distributions for allowed modes
Hi. Here is a code to compute the convolution of two discrete-time signals x[n] and y[n].
This demo is to validate the MLR-based method for SSVEP recognition.

An array signal parameter maximum likelihood estimator variance simulations
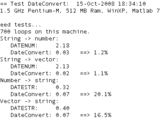
Simple but fast date conversion: 1.3% of DATESTR time, 20% of DATEVEC/ DATENUM time
inputs, but in consequence they are slow. If the input format is exactly known, the conversion can be much faster: DATENUM('17-Oct-2009 11:08:23'): 2.97 sec DateConvert('17-Oct-2009 11:08:23', 'number
A function to calculate the cumulative dose-volume histogram (DVH) and DVH parameters from a dose map and binary structure mask.
; 0.3], 'Dperc', 99, 'Vvol', 45);>> params params = 1×2 table D99% (Gy) V45.0cc (cc) _________ ____________ 40.711 29.889 >> plot(dvh_values(:, 1

Fast SVD % function [U,S, V]=rsvd (X, r,q,p) % % usage : % % input: % * X : matrix whose SVD we want % * r : trunction (rank ) for exa
Calculates and plots the photonic bands at constant frequency for a 2D photonic crystal.
This toolbox is used to represent the kinematic diagram of any robot using both solid 3D frames and solid links.
This is a simple robotics toolbox designed to study and understand the forward kinematics of robot manipulators. Unlike Peter Corke's toolbox, the representation is not done automatically through the
Run models on Arduino boards.
implementation.ContentsAutomated Build, Deployment, and ExecutionLibrary of Simulink blocks for Arduino peripherals like ADC, PWM, Serial, I2C, SPICommunicate with Hardware in Normal Mode Simulation Using Connected I/O
this is a fast multi svm by using tow class svm in matlab ....
Root Finding Method (Newton Raphson)
Root Finding Method (Bisection)

Auto generated GUIs for models or subsystems with real time emulation.
Reads the video and saves each frames as a png file
This function spacial_predict does spatial prediction of the input image.

General package for large-scale biologically plausible simulations (with GUI).
Creates an N-dimensional sparse array object, for arbitrary N.
This submission defines a class of N-dimensional sparse arrays for N possibly greater than 2. However, it should really be thought of as a way of starting with an ordinary MATLAB sparse matrix and
Vous pouvez également sélectionner un site web dans la liste suivante :
Amériques
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asie-Pacifique
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)