Control System Designer
Concevoir des contrôleurs SISO (single-input, single-output).
Description
L’application Control System Designer vous permet de concevoir des contrôleurs SISO (single-input, single-output) pour les systèmes de rétroaction modélisés dans MATLAB® ou Simulink® (le logiciel Simulink Control Design™ est requis).
Avec cette application, vous pouvez :
Concevoir des contrôleurs au moyen des éléments suivants :
Diagramme de Bode interactif, lieu des racines et éditeurs graphiques de diagrammes de Black (Nichols) permettant l’ajout, la modification et la suppression des pôles, zéros et gains des contrôleurs
Réglage PID, LQG ou IMC automatisé
Réglage basé sur l’optimisation (nécessite le logiciel Simulink Design Optimization™)
Loop shaping automatisé
Régler les correcteurs pour les architectures de contrôle à boucle unique ou multi-boucles.
Analyser les designs de systèmes de contrôle avec des réponses temporelles et fréquentielles, comme les réponses indicielles et les diagrammes des pôles et des zéros.
Comparer les tracés de réponse pour plusieurs designs de systèmes de contrôle.
Concevoir des contrôleurs pour les applications de contrôle multi-modèles.

Ouvrir l'application Control System Designer
Toolstrip MATLAB : dans l'onglet Apps, sous Control System Design and Analysis, cliquez sur l’icône de l’application.
Invite de commande MATLAB : saisissez
controlSystemDesigner.Toolstrip Simulink : dans l'onglet Apps, sous Control Systems, cliquez sur l’icône de l’application.
Exemples
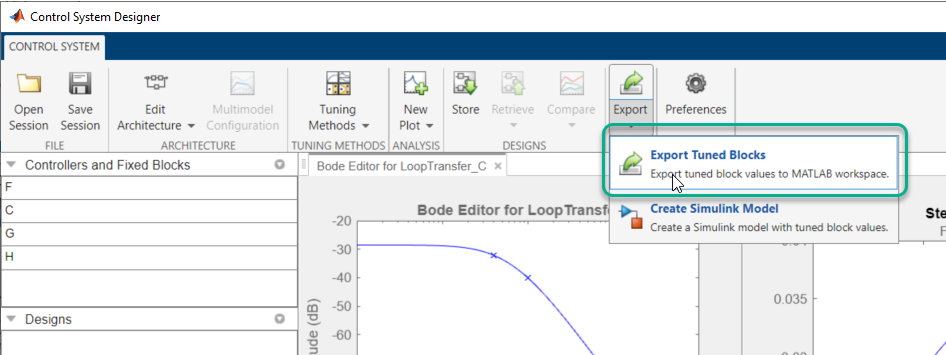
Après avoir conçu votre contrôleur dans Control System Designer, vous pouvez exporter votre design vers l’espace de travail MATLAB pour poursuivre l’analyse ou le design.
Dans Control System Designer, dans l’onglet Control System, sous Export, cliquez sur Export tuned blocks.
Dans la boîte de dialogue Export Model, dans le menu déroulant Select Design, choisissez le design que vous souhaitez exporter. Vous pouvez sélectionner le Current Design ou l’un des designs stockés à partir du Data Browser.

Dans le tableau Export models to MATLAB Workspace, dans la colonne Export, sélectionnez les modèles que vous souhaitez exporter.
Pour tous les designs, vous pouvez exporter les modèles de contrôleur et de préfiltre. Aussi, pour le Current Design, vous pouvez exporter les modèles de bloc fixes et toutes les réponses à partir du Data Browser.
Pour plus d’informations sur les blocs de préfiltre, de contrôleur et fixes dans chaque architecture de contrôle, consultez Feedback Control Architectures in Control System Designer.
Dans la colonne Export as, vous pouvez spécifier un autre nom pour le modèle exporté. Exporter un modèle avec le même nom qu’une variable existante de l’espace de travail MATLAB écrase la variable.
Pour sauvegarder les modèles sélectionnés dans l’espace de travail MATLAB, cliquez sur Export.
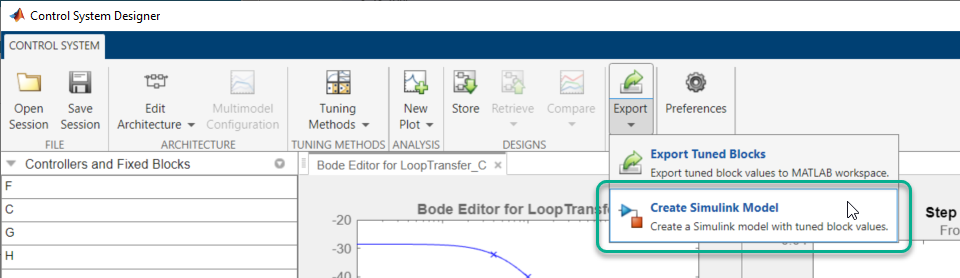
Après avoir conçu vos contrôleurs dans Control System Designer, pour simuler votre système, vous pouvez générer automatiquement un modèle Simulink pour votre architecture de contrôle.
Dans l’onglet Control System, sous Export, cliquez sur Create Simulink Model.
L’application exporte les contrôleurs et les blocs fixes pour le design actuel vers l’espace de travail MATLAB et génère un modèle Simulink qui correspond à l’architecture de contrôle actuelle. Pour plus d’informations sur les contrôleurs et les blocs fixes dans chaque architecture de contrôle, consultez Feedback Control Architectures in Control System Designer.
Par exemple, si vous concevez un système de contrôle en utilisant la configuration 1, Control System Designer exporte C, F, G et H vers l’espace de travail MATLAB et génère le modèle Simulink suivant.

Dans le modèle généré, le bloc Input est un Signal Generator (Simulink). Avec ce bloc, vous simulez votre modèle avec différentes formes d’onde d’entrée, telles que des ondes sinusoïdales ou des signaux aléatoires. Pour générer une réponse indicielle, remplacez le bloc Input par un bloc Step (Simulink).
Pour générer un modèle Simulink pour un design stocké, faites préalablement le design. Dans l’onglet Control System, sous Retrieve, sélectionnez le design pour lequel vous souhaitez générer un modèle.
Exemples associés
Utilisation programmatique
controlSystemDesigner ouvre l’application Control System Designer avec l’architecture de contrôle par défaut suivante :

L’architecture se compose des objets LTI suivants :
G — Modèle de système physique
C — Correcteur
H — Modèle de capteur
F — Préfiltre
Par défaut, l’application configure chacun de ces modèles en tant que gain unitaire.
controlSystemDesigner( initialise le correcteur C avec le modèle LTI SISO plant,comp)comp.
controlSystemDesigner( initialise le modèle de capteur H sur plant,comp,sensor)sensor. sensor peut être n’importe quel modèle LTI SISO ou une matrice de ces modèles. Si vous spécifiez à la fois plant et sensor en tant que matrices de modèles LTI, les longueurs des matrices doivent coïncider.
controlSystemDesigner( initialise le modèle de préfiltre F sur le modèle LTI SISO plant,comp,sensor,prefilt)prefilt.
controlSystemDesigner( ouvre l’application et définit la configuration initiale de l’éditeur graphique. views)views peut être n’importe lequel des vecteurs de caractères suivants ou un cell array regroupant plusieurs vecteurs de caractères.
"rlocus"— Éditeur de lieux des racines"bode"— Éditeur de diagramme de Bode en boucle ouverte"nichols"— Éditeur de diagramme de Nichols en boucle ouverte"filter"— Éditeur de diagramme de Bode pour la réponse en boucle fermée de l’entrée du préfiltre à la sortie du système physique
En plus d'ouvrir les éditeurs graphiques spécifiés, l'application trace la réponse indicielle d'entrée-sortie en boucle fermée.
controlSystemDesigner( spécifie la configuration initiale du tracé et initialise le système physique, le correcteur, le capteur et le préfiltre à l'aide des modèles spécifiés. Si un modèle est omis, l’application utilise la valeur par défaut.views,plant,comp,sensor,prefilt)
controlSystemDesigner( ouvre l’application et initialise la configuration du système au moyen de la structure des données d’initialisation initData)initdata. Pour créer initdata, utilisez sisoinit.
controlSystemDesigner( ouvre l’application et charge une session enregistrée précédemment. sessionFile)sessionFile est le nom d’un fichier de données de session sur le chemin MATLAB. Ces données comprennent l'architecture du système actuel et la configuration du tracé, ainsi que toutes les réponses et tous les designs enregistrés dans le Data Browser.
Pour enregistrer une session, dans l'application Control System Designer, dans l’onglet Control System, cliquez sur  Save Session.
Save Session.