pidTuner
Open PID Tuner for PID tuning
Description
pidTuner(
launches PID Tuner with a baseline controller sys,Cbase)Cbase so
that you can compare performance between the designed controller and the
baseline controller. If Cbase is a
pid, pidstd,
pid2 or pidstd2 controller
object, PID Tuner designs a controller of the same form, type, and discrete
integrator formulas as Cbase.
pidTuner( designs a
parallel-form PI controller.sys)
pidTuner launches PID Tuner with default plant of 1 and
proportional (P) controller of 1.
Examples
Input Arguments
Plant model for controller design, specified as one of these.
Any System Identification Toolbox™ SISO linear model (
idtf(System Identification Toolbox),idfrd(System Identification Toolbox),idgrey(System Identification Toolbox),idpoly(System Identification Toolbox),idproc(System Identification Toolbox), oridss(System Identification Toolbox)).A continuous- or discrete-time model.
Stable, unstable, or integrating. However, you might not be able to stabilize a plant with unstable poles under PID control.
A model that includes any type of time delay. A plant with long time delays, however, might not achieve adequate performance under PID control.
If the plant has unstable poles, and sys is
either:
A
frdmodelA
ssmodel with internal time delays that cannot be converted to I/O delays
then you must specify the number of unstable poles in the plant.
To do this, after opening PID Tuner, in the
Plant menu, select
![]()
Import. In the Import Linear System
dialog box, reimport sys, specifying the
number of unstable poles where prompted.
Controller type of the controller to design, specified as a
character vector. The term controller
type refers to which terms are present in the
controller action. For example, a PI controller has only a
proportional and an integral term, while a PIDF controller
contains proportional, integrator, and filtered derivative
terms. type can take the values summarized
below. For more detailed information about these controller
types, see PID Controller Types for Tuning.
1-DOF Controllers
'P'— Proportional only'I'— Integral only'PI'— Proportional and integral'PD'— Proportional and derivative'PDF'— Proportional and derivative with first-order filter on derivative term'PID'— Proportional, integral, and derivative'PIDF'— Proportional, integral, and derivative with first-order filter on derivative term
2-DOF Controllers
'PI2'— 2-DOF proportional and integral'PD2'— 2-DOF proportional and derivative'PDF2'— 2-DOF proportional and derivative with first-order filter on derivative term'PID2'— 2-DOF proportional, integral, and derivative'PIDF2'— 2-DOF proportional, integral, and derivative with first-order filter on derivative term
For more information about 2-DOF PID controllers generally, see Two-Degree-of-Freedom PID Controllers.
2-DOF Controllers with Fixed Setpoint Weights
'I-PD'— 2-DOF PID with b = 0, c = 0'I-PDF'— 2-DOF PIDF with b = 0, c = 0'ID-P'— 2-DOF PID with b = 0, c = 1'IDF-P'— 2-DOF PIDF with b = 0, c = 1'PI-D'— 2-DOF PID with b = 1, c = 0'PI-DF'— 2-DOF PIDF with b = 1, c = 0
For more detailed information about fixed-setpoint-weight 2-DOF PID controllers, see PID Controller Types for Tuning.
Controller Form
When you use the type input, PID
Tuner designs a controller in parallel form. If you want
to design a controller in standard form, Use the input
Cbase instead of
type, or select
Standard from the
Form menu. For more information
about parallel and standard forms, see the pid
and pidstd
reference pages.
If sys is a discrete-time model with
sample time Ts, PID Tuner designs a
discrete-time pid controller using
the ForwardEuler discrete integrator
formula. To design a controller having a different
discrete integrator formula:
Use the input argument
Cbaseinstead oftype. PID Tuner reads controller type, form, and discrete integrator formulas from the baseline controllerCbase.In PID Tuner, click Options to open the Controller Options dialog box. Select discrete integrator formulas from the Integral Formula and Derivative Formula menus.
For more information about discrete
integrator formulas, see the pid
and pidstd
reference pages.
A dynamic system representing a baseline controller, permitting
comparison of the performance of the designed controller to the
performance of Cbase.
If Cbase is a pid or
pidstd
object, PID Tuner also uses it to configure the type, form, and
discrete integrator formulas of the designed controller. The
designed controller:
Is the type represented by
Cbase.Is a parallel-form controller, if
Cbaseis apidcontroller object.Is a standard-form controller, if
Cbaseis apidstdcontroller object.Is a parallel-form 2-DOF controller, if
Cbaseis apid2controller object.Is a standard-form 2-DOF controller, if
Cbaseis apidstd2controller object.Has the same
IformulaandDformulavalues asCbase. For more information aboutIformulaandDformula, see thepidandpidstdreference pages.
If Cbase is any other dynamic system, PID
Tuner designs a parallel-form PI controller. You can change the
controller form and type using the Form and
Type menus after launching PID
Tuner.
Tips
If
typeorCbasespecifies a one-degree-of-freedom (1-DOF) PID controller, thenpidTunerdesigns a controller for the unit feedback loop as illustrated: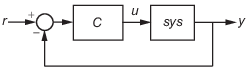
If
typeorCbasespecifies a two-degree-of-freedom (2-DOF) PID controller, thenpidTunerdesigns a 2-DOF controller as in the feedback loop of this illustration: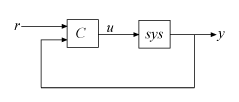
PID Tuner has a default target phase margin of 60 degrees and automatically tunes the PID gains to balance performance (response time) and robustness (stability margins). Use the Response time or Bandwidth and Phase Margin sliders to tune the controller's performance to your requirements. Increasing performance typically decreases robustness, and vice versa.
Select response plots from the Response menu to analyze the controller's performance.
If you provide
Cbase, check Show baseline to display the response of the baseline controller.For more detailed information about using PID Tuner, see Designing PID Controllers with PID Tuner.
For interactive PID tuning in the Live Editor, see the Tune PID Controller Live Editor task. This task lets you interactively design a PID controller and automatically generates MATLAB® code for your live script.
Algorithms
For information about the MathWorks® PID tuning algorithm, see PID Tuning Algorithm.
Alternatives
You can open PID Tuner from the MATLAB desktop, in the Apps tab. When you do so, use the Plant menu in PID Tuner to specify your plant model.
For PID tuning at the command line, use pidtune. The pidtune command
can design a controller for multiple plants at once.
For interactive PID tuning in the Live Editor, see the Tune PID Controller Live Editor task. This task lets you interactively design a PID controller and automatically generates MATLAB code for your live script.
Version History
Introduced in R2014b