dsp.DCBlocker
Bloquer le composant DC (offset) du signal d’entrée
Description
Le dsp.DCBlocker System object™ supprime l’offset DC de chaque canal (colonne) du signal d’entrée. L’opération s’exécute en continu afin d’estimer et de supprimer en permanence l’offset DC.
Pour bloquer le composant DC du signal d’entrée :
Créez l’objet
dsp.DCBlockeret définissez ses propriétés.Appelez l’objet avec des arguments, comme s’il s’agissait d’une fonction.
Pour en savoir plus sur le fonctionnement des System objects, veuillez consulter Que sont les System objects ?
L’objet supporte la génération de code C/C++ et la génération de code SIMD sous certaines conditions. Pour plus d’informations, veuillez consulter Génération de code.
Création
Description
dcblker = dsp.DCBlockerdcblker, afin de bloquer le composant DC de chaque canal (colonne) du signal d’entrée.
dcblker = dsp.DCBlocker(PropertyName=Value)NormalizedBandwidth sur 0,004.
Propriétés
Utilisation
Syntaxe
Description
dcblkerOut = dcblker(input)
Arguments en entrée
Arguments de sortie
Fonctions d'objet
Pour utiliser une fonction d’objet, définissez System object en tant que premier argument en entrée. Par exemple, pour libérer les ressources système d’un System object nommé obj, utilisez la syntaxe suivante :
release(obj)
Exemples
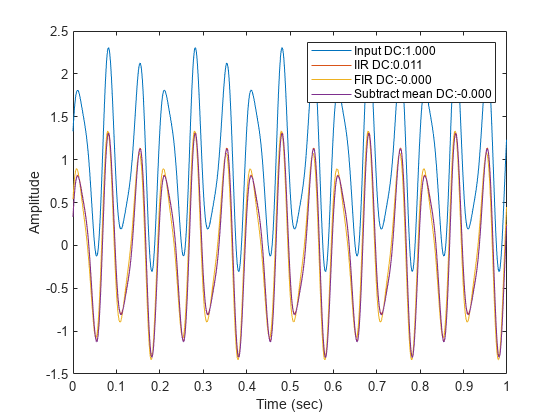
Supprimez le composant DC d’un signal d’entrée à l’aide des algorithmes d’estimation IIR, FIR et de soustraction de la moyenne.
Créez un signal composé d’un signal sonore de 15 Hz, d’un signal sonore de 25 Hz et d’un offset DC.
t = (0:0.001:100)'; x = sin(30*pi*t) + 0.33*cos(50*pi*t) + 1;
Créez trois objets bloqueurs DC pour les trois algorithmes d’estimation.
dc1 = dsp.DCBlocker(Algorithm="IIR",Order=6); dc2 = dsp.DCBlocker(Algorithm="FIR",Length=100); dc3 = dsp.DCBlocker(Algorithm="Subtract mean");
Chaque seconde, passez le signal d’entrée à travers les bloqueurs DC. En implémentant les bloqueurs DC à chaque seconde, vous pouvez observer les différences dans les temps de convergence.
for idx = 1 : 100 range = (1:1000) + 1000*(idx-1); y1 = dc1(x(range)); % IIR estimate y2 = dc2(x(range)); % FIR estimate y3 = dc3(x(range)); % Subtract mean end
Tracez les données d’entrée et de sortie des trois bloqueurs DC pour la première seconde, puis indiquez la valeur moyenne de chaque signal. Les valeurs moyennes des trois types d’algorithmes indiquent que les algorithmes FIR et Subtract mean convergent plus rapidement.
plot(t(1:1000),x(1:1000), ... t(1:1000),y1, ... t(1:1000),y2, ... t(1:1000),y3); xlabel("Time (sec)") ylabel("Amplitude") legend(sprintf("Input DC:%.3f",mean(x)), ... sprintf("IIR DC:%.3f",mean(y1)), ... sprintf("FIR DC:%.3f",mean(y2)), ... sprintf("Subtract mean DC:%.3f",mean(y3)));
Comparez le spectre d’un signal d’entrée présentant un offset DC avec celui du même signal après application d’un bloqueur DC. Activez le bloqueur DC pour qu’il utilise l’algorithme d’estimation FIR.
Créez un signal d’entrée composé de trois signaux sonores et présentant un offset DC de 1. Définissez la fréquence d’échantillonnage sur 1 kHz et la durée du signal sur 100 secondes.
fs = 1000; t = (0:1/fs:100)'; x = sin(30*pi*t) + 0.67*sin(40*pi*t) + 0.33*sin(50*pi*t) + 1;
Créez un objet bloqueur DC qui utilise l’algorithme FIR pour estimer l’offset DC.
dcblker = dsp.DCBlocker(Algorithm="FIR",Length=100);
Créez un analyseur de spectre avec des unités de puissance définies sur dBW et une plage de fréquences de [-30 30] afin d’afficher la réponse en fréquence du signal d’entrée. À l’aide de la fonction clone, créez un deuxième analyseur de spectre afin d’afficher la réponse de la sortie. Utilisez ensuite la propriété Title des analyseurs de spectre pour les labelliser.
hsa = spectrumAnalyzer(SampleRate=fs, ... Method="welch",... AveragingMethod="exponential",... SpectrumUnits="dBW",FrequencySpan="start-and-stop-frequencies",... StartFrequency=-30,StopFrequency=30,YLimits=[-200 20],... Title="Signal Spectrum"); hsb = clone(hsa); hsb.Title = "Signal Spectrum After DC Blocker";
Passez le signal d’entrée, x, à travers le bloqueur DC pour générer le signal de sortie, y.
y = dcblker(x);
Utilisez le premier analyseur de spectre pour afficher les caractéristiques de fréquence du signal d’entrée. Les signaux sonores à 15, 20 et 25 Hz, ainsi que le composant DC, sont clairement visibles.
hsa(x)

Utilisez le deuxième analyseur de spectre pour afficher les caractéristiques de fréquence du signal de sortie. Le composant DC a été supprimé.
hsb(y)

Algorithmes
Références
[1] Nezami, M. “Performance Assessment of Baseband Algorithms for Direct Conversion Tactical Software Defined Receivers: I/Q Imbalance Correction, Image Rejection, DC Removal, and Channelization.” MILCOM, 2002.