Modèles polynomiaux d’entrée-sortie
Un modèle polynomial utilise une notion généralisée de fonctions de transfert pour exprimer la relation entre l'entrée, u(t), la sortie y(t) et le bruit e(t) au moyen d’une équation du type :
A(q), B(q), F(q), C(q) et D(q) sont des matrices polynomiales relative à l'opérateur de décalage dans le temps q-1. u(t) correspond à l'entrée et nk au retard d'entrée. y(t) correspond à la sortie et e(t), au signal de perturbation.
Chaque polynôme présente un ordre indépendant ou un nombre de coefficients estimables. Par exemple, si A(q) présente un ordre 2, le polynôme A présente la forme A(q) = 1 + a1q-1 + a2q-2.
Dans la pratique, tous les polynômes ne sont pas actifs simultanément. Les formes polynomiales plus simples, telles que les modèles ARX, ARMAX, erreur de sortie et Box-Jenkins, fournissent des structures de modèle adaptées à des objectifs spécifiques, tels que la gestion des perturbations non stationnaires ou la mise à disposition d'un paramétrage totalement indépendant pour la dynamique et le bruit. Pour plus d'informations sur ces types de modèle, consultez What Are Polynomial Models?.
Applications
| System Identification | Identifier des modèles de systèmes dynamiques à partir de données mesurées |
Fonctions
Rubriques
Principes de base des modèles polynomiaux
- What Are Polynomial Models?
Polynomial model structures including ARX, ARMAX, output-error, and Box-Jenkins. - Data Supported by Polynomial Models
Use time-domain and frequency-domain data to estimate discrete-time and continuous-time models.
Estimer des modèles polynomiaux
- Preliminary Step – Estimating Model Orders and Input Delays
To estimate polynomial models, you must provide input delays and model orders. - Estimate Polynomial Models in the App
Import data into the app, specify model orders, delays and estimation options. - Estimate Polynomial Models at the Command Line
Specify model orders, delays, and estimation options. - Polynomial Sizes and Orders of Multi-Output Polynomial Models
Size of A, B, C, D, and F polynomials for multi-output models. - Estimate Models Using armax
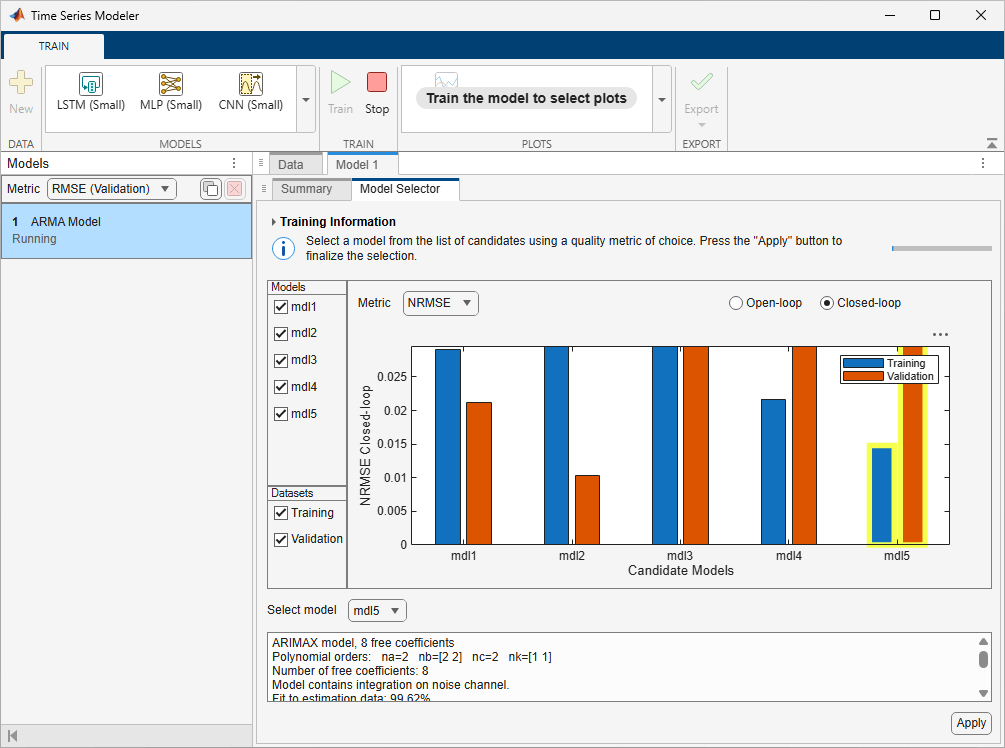
This example shows how to estimate a linear, polynomial model with an ARMAX structure for a three-input and single-output (MISO) system. - Estimate ARMA Model Using Time Series Modeler app
Train, compare, and export ARMA models using the Time Series app.
Définir les options d’un modèle polynomial
- Specifying Initial States for Iterative Estimation Algorithms
Specify initial conditions of polynomial models for iterative estimation algorithms. - Polynomial Model Estimation Algorithms
Choose between the ARX and IV algorithms for ARX and AR model estimation.
Sélection d՚exemples

Spectrum Estimation Using Complex Data - Marple's Test Case
Perform spectral estimation on time series data. We use Marple's test case (The complex data in L. Marple: S.L. Marple, Jr, Digital Spectral Analysis with Applications, Prentice-Hall, Englewood Cliffs, NJ 1987.)

Picking Instrumental Variables for System Identification
Illustration of the meaning and choice of instrumental variables (IVs) for system identification.
Predict Battery State-Of-Charge Using Time Series Modeler App
Train a multi-input single output autoregressive integrated moving average with extra input (ARIMAX) model using the Time Series Modeler app. You can use the workflow in this example to train autoregressive moving average (ARMA) models with different structures and training options.