polyest
Estimate polynomial model using time- or frequency-domain data
Syntax
Description
Estimate Polynomial Model
sys = polyest(tt,[na nb nc nd nf nk])sys using the data contained in the
variables of timetable tt. The software uses the first
Nu variables as inputs and the next Ny variables
as outputs, where Nu and Ny are determined from the
specified polynomial orders.
sys is of the form
A(q),
B(q), F(q),
C(q) and
D(q) are polynomial matrices.
u(t) is the input, and nk is
the input delay. y(t) is the output and
e(t) is the disturbance signal.
na, nb, nc,
nd, and nf are the orders of the
A(q), B(q),
C(q), D(q),
and F(q) polynomials, respectively.
To select specific input and output channels from tt, use
name-value syntax to set 'InputName' and
'OutputName' to the corresponding timetable variable names.
sys = polyest(___,Name,Value)Name,Value arguments. You can use this
syntax with any of the previous input-argument combinations.
Configure Initial Parameters
Specify Additional Estimation Options
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = polyest(___)initialCondition
object. Use this syntax if you plan to simulate or predict the model response using the
same estimation input data, then compare the response with the same estimation output
data. Incorporating the initial conditions yields a better match during the first part of
the simulation.
Examples
Estimate a model with redundant parameterization, that is, a model with all polynomials (, , , , and ) active.
Load the estimation data timetable tt2.
load sdata2 tt2;
Specify the model orders and delays.
na = 2; nb = 2; nc = 3; nd = 3; nf = 2; nk = 1;
Estimate the model.
sys = polyest(tt2,[na nb nc nd nf nk]);
Compare the model output to the measured output.
compare(tt2,sys)

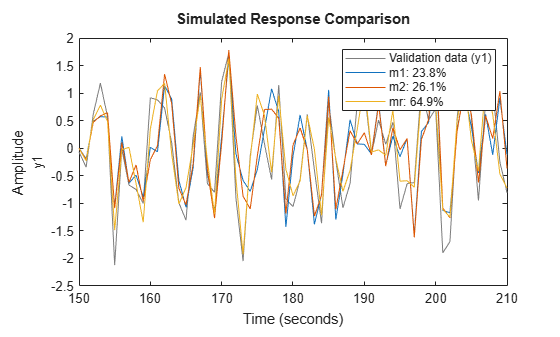
Estimate a regularized polynomial model by converting a regularized ARX model.
Load the estimation data iddata object m0simdata.
load regularizationExampleData.mat m0simdata;
Estimate an unregularized polynomial model of order 20.
m1 = polyest(m0simdata(1:150),[0 20 20 20 20 1]);
Estimate a regularized polynomial model of the same order. Use a Lambda value of one.
opt = polyestOptions; opt.Regularization.Lambda = 1; m2 = polyest(m0simdata(1:150),[0 20 20 20 20 1],opt);
Obtain a lower-order polynomial model by converting a regularized ARX model and reducing its order. Use arxregul to determine the regularization parameters.
[L,R] = arxRegul(m0simdata(1:150),[30 30 1]); opt1 = arxOptions; opt1.Regularization.Lambda = L; opt1.Regularization.R = R; m0 = arx(m0simdata(1:150),[30 30 1],opt1); mr = idpoly(balred(idss(m0),7));
Compare the model outputs against the data.
opt2 = compareOptions('InitialCondition','z'); compare(m0simdata(150:end),m1,m2,mr,opt2);
Load input/output data and create cumulative sum input and output signals for estimation.
load iddata1 z1 data = iddata(cumsum(z1.y),cumsum(z1.u),z1.Ts,'InterSample','foh');
Specify the model polynomial orders. Set the orders of the inactive polynomials, and , to 0.
na = 2; nb = 2; nc = 2; nd = 0; nf = 0; nk = 1;
Identify an ARIMAX model by setting the 'IntegrateNoise' option to true.
sys = polyest(data,[na nb nc nd nf nk],'IntegrateNoise',true);Compare the simulated model output to the measured output.
compare(data,sys)

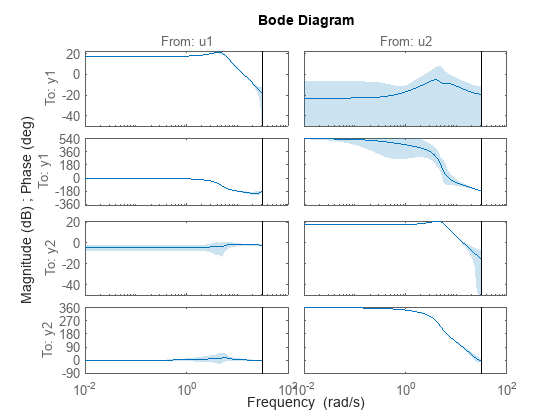
Estimate a multi-output ARMAX model for a multi-input, multi-output data set.
Load estimation data.
load iddata1 z1 load iddata2 z2 data = [z1 z2(1:300)];
data is a data set with two inputs and two outputs. The first input affects only the first output. Similarly, the second input affects only the second output.
Specify the model orders and delays. The F and D polynomials are inactive.
na = [2 2; 2 2]; nb = [2 2; 3 4]; nk = [1 1; 0 0]; nc = [2;2]; nd = [0;0]; nf = [0 0; 0 0];
Estimate the model.
sys = polyest(data,[na nb nc nd nf nk]);
In the estimated ARMAX model, the cross terms, which model the effect of the first input on the second output and vice versa, are negligible. If you assigned higher orders to those dynamics, their estimation would show a high level of uncertainty.
Analyze the results. The responses from the cross terms show larger uncertainty.
h = bodeplot(sys); showConfidence(h,3)
Load the data.
load iddata1ic z1i
Estimate a polynomial model sys and return the initial conditions in ic.
na = 2; nb = 2; nc = 3; nd = 3; nf = 2; nk = 1; [sys,ic] = polyest(z1i,[na nb nc nd nf nk]); ic
ic =
initialCondition with properties:
A: [7×7 double]
X0: [7×1 double]
C: [0 0 0 0 0 0 1]
Ts: 0.1000
ic is an initialCondition object that represents the free response of sys, in state-space form, to the initial state vector in X0. You can incorporate ic when you simulate sys with the z1i input signal and compare the response with the z1i output signal.
Input Arguments
Name-Value Arguments
Output Arguments
Tips
In most situations, all the polynomials of an identified polynomial model are not simultaneously active. Set one or more of the orders
na,nc,ndandnfto zero to simplify the model structure.For example, you can estimate an output-error (OE) model by specifying
na,ncandndas zero.Alternatively, you can use a dedicated estimating function for the simplified model structure. Linear polynomial estimation functions include
oe,bj,arxandarmax.
Alternatives
To estimate a polynomial model using time-series data, use
ar.If the structure of the estimated polynomial model is known, that is, you know which polynomials will be active, then use the appropriate dedicated estimating function. For examples, for an ARX model, use
arx. Other polynomial model estimating functions includeoe,armax, andbj.To estimate a continuous-time transfer function, use
tfest. You can also useoe, but only with continuous-time frequency-domain data.