compassAngle
Description
C = compassAngle(orientations)orientations. Les angles de la boussole sont des angles dans le sens inverse des aiguilles d'une montre depuis le nord du cadre de référence jusqu'aux directions x des cadres définis par orientations. Voir Angle de la boussole pour plus de détails.
C = compassAngle(orientations,RF)"NED" (nord-est en bas) ou "ENU" (est-nord en haut) .
Exemples
Arguments d'entrée
Arguments de sortie
En savoir plus
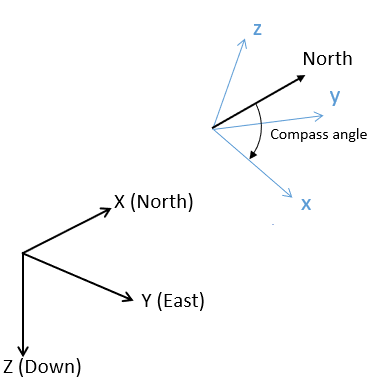
L'angle de la boussole est défini comme l'angle entre le nord et la direction x du cadre du corps. Dans le cadre de référence NED, l'angle de la boussole est l'angle dans le sens inverse des aiguilles d'une montre entre la direction x positive du cadre NED et la direction x positive du cadre du corps. L'entrée orientations définit la transformation des coordonnées de rotation du cadre de référence au cadre du corps. Les angles de la boussole dans les directions nord, est, sud et ouest sont respectivement 0, π/2, π et 3π/2.
Références
[1] Gade, Kenneth. “The Seven Ways to Find Heading.” Journal of Navigation, vol. 69, no. 5, Sept. 2016, pp. 955–70.
Capacités étendues
Historique des versions
Introduit dans R2023b
Voir aussi
gravitydir | tilt | linaccel