gravitydir
Vecteur de direction gravitationnelle pour une orientation donnée
Depuis R2023b
Description
D = gravitydir(orientations)orientations. Par défaut, le référentiel de ces orientations est le référentiel nord-est-bas (NED). Voir Direction de la gravité pour plus de détails.
D = gravitydir(orientations,RF)"NED" (nord-est en bas) ou "ENU" (est-nord en haut) cadre.
Exemples
Créez un quaternion d'identité et obtenez le vecteur de direction de gravité correspondant. Vérifiez que le vecteur de direction de la gravité est [0 0 1] comme prévu.
quat0 = ones(1,"quaternion");
dir1 = gravitydir(quat0)dir1 = 1×3
0 0 1
Ensuite, créez un quaternion qui correspond à une rotation x de 90 degrés. Obtenez le vecteur de direction de la gravité.
angles = [0 0 90]; quat1 = quaternion(angles,"eulerd","ZYX","frame"); dir2 = gravitydir(quat1)
dir2 = 1×3
0 1.0000 0.0000
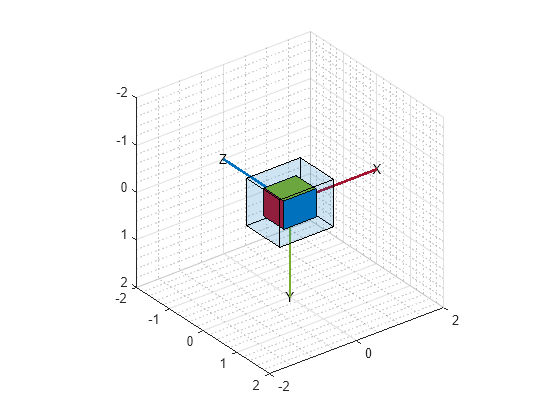
Vous pouvez vérifier visuellement ce résultat en utilisant la fonction poseplot . Sur la figure, vous pouvez voir que l’accélération gravitationnelle se situe le long de l’axe y.
poseplot(quat1)
Remplacez le cadre de référence par le cadre est-nord-haut (ENU) et obtenez le vecteur de direction de la gravité.
dir3 = gravitydir(quat1,"ENU")dir3 = 1×3
0 -1.0000 -0.0000
Enfin, créez un vecteur de quaternions aléatoires et obtenez les vecteurs de direction de gravité correspondants.
rng(2023) % For repeatable results
quats = randrot(10,1);
D = gravitydir(quats)D = 10×3
-0.2859 -0.8615 -0.4197
-0.7971 -0.3204 0.5119
0.3598 0.7139 -0.6007
0.3622 0.6720 0.6460
0.1749 0.4020 0.8988
0.4627 0.3655 -0.8077
0.3134 0.8613 0.4000
0.8776 0.4267 -0.2185
-0.9924 -0.1226 0.0137
0.4086 -0.4099 0.8155
Arguments d'entrée
Arguments de sortie
En savoir plus
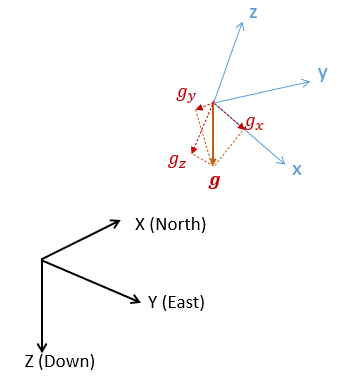
La fonction gravitydir renvoie le vecteur de direction de la gravité exprimé dans le cadre du corps dont l'orientation est donnée par l'argument d'entrée orientations . Par exemple, dans le cadre de référence NED, l'orientation définit la transformation des coordonnées de rotation du cadre NED (X-Y-Z) vers le cadre du corps (x-y-z). La fonction gravitydir résout le vecteur de direction de la gravité g en trois composantes g x , g y , et g z et renvoie ces composants.
Capacités étendues
Historique des versions
Introduit dans R2023b
Voir aussi
linaccel | compassAngle | tilt