Complementary Filter
Estimer l'orientation à l'aide d'un filtre complémentaire
Depuis R2023a
Bibliothèques :
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Navigation Filters
Navigation Toolbox /
Multisensor Positioning /
Navigation Filters
Description
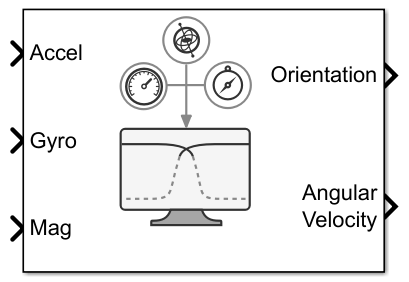
Le Complementary Filter Simulink® fusionne les données des capteurs de l'accéléromètre, du magnétomètre et du gyroscope pour estimer l'orientation de l'appareil.
Ports
Saisir
Sortir
Paramètres
Capacités étendues
Historique des versions
Introduit dans R2023a