copy
Copier l'objet SLAM lidar
Syntaxe
Description
newSlamObj = copy(slamObj)slamObj avec les mêmes propriétés. Toutes les modifications apportées à newSlamObj ne sont pas reflétées dans slamObj.
Exemples
Créez un objet lidarSLAM .
slamObj = lidarSLAM
slamObj =
lidarSLAM with properties:
PoseGraph: [1x1 poseGraph]
MapResolution: 20
MaxLidarRange: 8
OptimizationFcn: @optimizePoseGraph
LoopClosureThreshold: 100
LoopClosureSearchRadius: 8
LoopClosureMaxAttempts: 1
LoopClosureAutoRollback: 1
OptimizationInterval: 1
MovementThreshold: [0 0]
ScanRegistrationMethod: 'BranchAndBound'
TranslationSearchRange: [4 4]
RotationSearchRange: 1.5708
Créez une copie de l'objet lidar SLAM.
slamObjNew = copy(slamObj)
slamObjNew =
lidarSLAM with properties:
PoseGraph: [1x1 poseGraph]
MapResolution: 20
MaxLidarRange: 8
OptimizationFcn: @optimizePoseGraph
LoopClosureThreshold: 100
LoopClosureSearchRadius: 8
LoopClosureMaxAttempts: 1
LoopClosureAutoRollback: 1
OptimizationInterval: 1
MovementThreshold: [0 0]
ScanRegistrationMethod: 'BranchAndBound'
TranslationSearchRange: [4 4]
RotationSearchRange: 1.5708
Chargez les données de numérisation laser à partir d'un fichier.
load("offlineSlamData.mat");Pour configurer l'algorithme SLAM :
Spécifiez la plage lidar, la résolution de la carte, le seuil de fermeture de boucle et le rayon de recherche.
Ajustez ces paramètres pour votre robot et votre environnement spécifiques.
Créez l'objet
lidarSLAMavec ces paramètres.
maxLidarRange = 8; mapResolution = 20; slamObj = lidarSLAM(mapResolution,maxLidarRange); slamObj.LoopClosureThreshold = 210; slamObj.LoopClosureSearchRadius = 8;
Ajoutez des analyses de manière itérative à l'objet SLAM.
for i = 1:numel(scans) addScan(slamObj,scans{i}); end
Créez une copie de l'objet SLAM. Affichez le graphique de pose sous-jacent de l'objet SLAM.
slamObj2 = copy(slamObj); slamObj2.PoseGraph
ans =
poseGraph with properties:
NumNodes: 71
NumEdges: 83
NumLoopClosureEdges: 13
LoopClosureEdgeIDs: [31 36 63 65 67 69 71 73 75 77 79 81 83]
LandmarkNodeIDs: [1x0 double]
Supprimez les deux premières fermetures de boucle en spécifiant leurs ID de bord.
lcEdgeIDs = slamObj2.PoseGraph.LoopClosureEdgeIDs(1:2); removeLoopClosures(slamObj2,lcEdgeIDs)
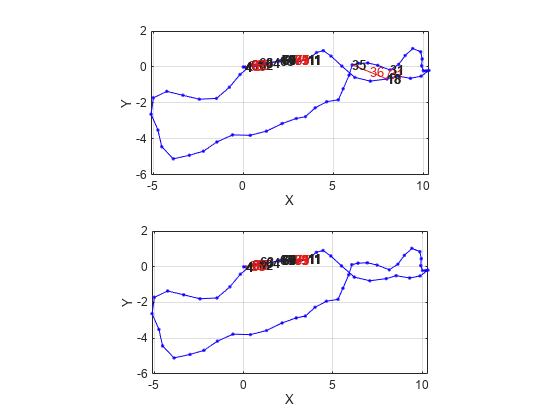
Tracez les graphiques de pose de l'objet SLAM avant et après la suppression des fermetures de boucle.
subplot(2,1,1) show(slamObj.PoseGraph); subplot(2,1,2) show(slamObj2.PoseGraph);
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2019b