moyenne
Rotation moyenne des quaternions
Description
quatAverage = meanrot(quat)quat le long de la première dimension du tableau dont la taille n'est pas égale à 1.
Si
quatest un vecteur,meanrot(quat)renvoie la rotation moyenne des éléments.Si
quatest une matrice,meanrot(quat)renvoie un vecteur ligne contenant la rotation moyenne de chaque colonne.Si
quatest un tableau multidimensionnel, alorsmearot(quat)opère le long de la première dimension du tableau dont la taille n'est pas égale à 1, traitant les éléments comme des vecteurs. Cette dimension devient 1 tandis que les tailles de toutes les autres dimensions restent les mêmes.
La fonction meanrot normalise les quaternions d'entrée, quat, avant de calculer la moyenne.
quatAverage = meanrot(quat,dim)dim. Par exemple, si quat est une matrice, alors meanrot(quat,2) est un vecteur colonne contenant la moyenne de chaque ligne.
quatAverage = meanrot(___,nanflag)NaN du calcul pour l'une des syntaxes précédentes. meanrot(quat,"includenan") inclut toutes les valeurs NaN dans le calcul tandis que mean(quat,"omitnan") les ignore.
Exemples
Créez une matrice de quaternions correspondant à trois ensembles d'angles d'Euler.
eulerAngles = [40 20 10; ... 50 10 5; ... 45 70 1]; quat = quaternion(eulerAngles,"eulerd","ZYX","frame");
Déterminez la rotation moyenne représentée par les quaternions. Convertissez la rotation moyenne en angles d'Euler en degrés pour plus de lisibilité.
quatAverage = meanrot(quat)
quatAverage = quaternion
0.88863 - 0.062598i + 0.27822j + 0.35918k
eulerAverage = eulerd(quatAverage,"ZYX","frame")
eulerAverage = 1×3
45.7876 32.6452 6.0407
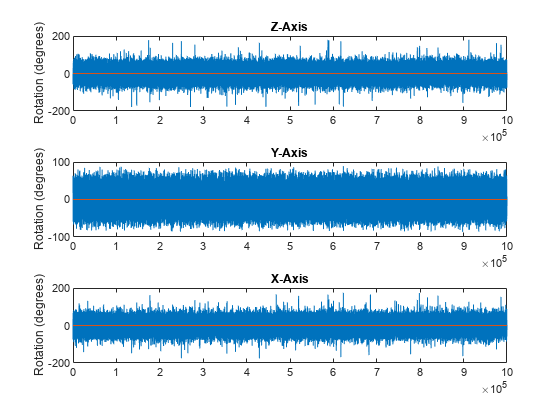
Utilisez meanrot sur une séquence de quaternions pour faire la moyenne du bruit additif.
Créez un vecteur de quaternions 1e6 dont la distance, telle que définie par la fonction dist , du quaternion(1,0,0,0) est normalement distribuée. Tracez les angles d'Euler correspondant au vecteur quaternion bruyant.
nrows = 1e6; ax = 2*rand(nrows,3) - 1; ax = ax./sqrt(sum(ax.^2,2)); ang = 0.5*randn(size(ax,1),1); q = quaternion(ax.*ang ,"rotvec"); noisyEulerAngles = eulerd(q,"ZYX","frame"); figure(1) subplot(3,1,1) plot(noisyEulerAngles(:,1)) title("Z-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,2) plot(noisyEulerAngles(:,2)) title("Y-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,3) plot(noisyEulerAngles(:,3)) title("X-Axis") ylabel("Rotation (degrees)") hold on

Utilisez meanrot pour déterminer le quaternion moyen étant donné le vecteur des quaternions. Convertissez en angles d'Euler et tracez les résultats.
qAverage = meanrot(q); qAverageInEulerAngles = eulerd(qAverage,"ZYX","frame"); figure(1) subplot(3,1,1) plot(ones(nrows,1)*qAverageInEulerAngles(:,1)) title("Z-Axis") subplot(3,1,2) plot(ones(nrows,1)*qAverageInEulerAngles(:,2)) title("Y-Axis") subplot(3,1,3) plot(ones(nrows,1)*qAverageInEulerAngles(:,3)) title("X-Axis")
L'algorithme meanrot
La fonction meanrot génère un quaternion qui minimise la norme de Frobenius au carré de la différence entre les matrices de rotation. Considérons deux quaternions :
q0ne représente aucune rotation.q90représente une rotation de 90 degrés autour de l'axe x .
q0 = quaternion([0 0 0],"eulerd","ZYX","frame"); q90 = quaternion([0 0 90],"eulerd","ZYX","frame");
Créez un balayage quaternion, qSweep, qui représente des rotations de 0 à 180 degrés autour de l'axe x .
eulerSweep = (0:1:180)'; qSweep = quaternion([zeros(numel(eulerSweep),2),eulerSweep], ... "eulerd","ZYX","frame");
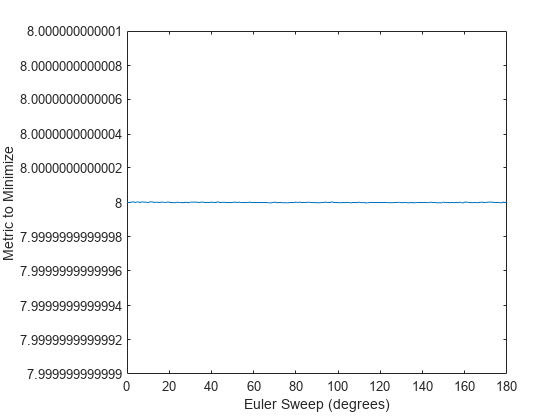
Convertissez q0, q90 et qSweep en matrices de rotation. Dans une boucle, calculez la métrique à minimiser pour chaque membre du balayage quaternion. Tracez les résultats et renvoyez la valeur du balayage d'Euler qui correspond au minimum de la métrique.
r0 = rotmat(q0,"frame"); r90 = rotmat(q90,"frame"); rSweep = rotmat(qSweep,"frame"); metricToMinimize = zeros(size(rSweep,3),1); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r90),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")

[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 45
Le minimum de la métrique correspond au balayage d'angle d'Euler à 45 degrés. Autrement dit, meanrot définit la moyenne entre quaterion([0 0 0],"ZYX","frame") et quaternion([0 0 90],"ZYX","frame") comme quaternion([0 0 45],"ZYX","frame"). Appelez meanrot avec q0 et q90 pour vérifier le même résultat.
eulerd(meanrot([q0,q90]),"ZYX","frame")
ans = 1×3
0 0 45.0000
Limites
La métrique utilisée par meanrot pour déterminer la rotation moyenne n'est pas unique pour les quaternions très éloignés les uns des autres. Répétez l’expérience ci-dessus pour les quaternions séparés de 180 degrés.
q180 = quaternion([0 0 180],"eulerd","ZYX","frame"); r180 = rotmat(q180,"frame"); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r180),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 159
Les moyennes des quaternions sont généralement calculées pour des rotations proches les unes des autres, ce qui rend le cas limite présenté dans cet exemple peu probable dans les applications du monde réel. Pour faire la moyenne de deux quaternions très éloignés l'un de l'autre, utilisez la fonction slerp . Répétez l'expérience en utilisant slerp et vérifiez que la moyenne des quaternions renvoyée est plus intuitive pour les grandes distances.
qMean = slerp(q0,q180,0.5); q0_q180 = eulerd(qMean,"ZYX","frame")
q0_q180 = 1×3
0 0 90.0000
Arguments d'entrée
Arguments de sortie
Algorithmes
meanrot détermine une moyenne de quaternion, , selon [1]. est le quaternion qui minimise la norme de Frobenius au carré de la différence entre les matrices de rotation :
Références
[1] Markley, F. Landis, Yang Chen, John Lucas Crassidis, and Yaakov Oshman. "Average Quaternions." Journal of Guidance, Control, and Dynamics. Vol. 30, Issue 4, 2007, pp. 1193-1197.
Capacités étendues
Historique des versions
Introduit dans R2019b