dormir
Interpolation linéaire sphérique
Syntaxe
Description
Exemples
Créez deux quaternions avec l'interprétation suivante :
a= rotation de 45 degrés autour de l'axe zc= rotation de -45 degrés autour de l'axe z
a = quaternion([45,0,0],"eulerd","ZYX","frame"); c = quaternion([-45,0,0],"eulerd","ZYX","frame");
Appelez slerp avec les quaternions a et c et spécifiez un coefficient d'interpolation de 0,5.
interpolationCoefficient = 0.5; b = slerp(a,c,interpolationCoefficient);
La sortie de slerp, b, représente une rotation moyenne de a et c. Pour vérifier, convertissez b en angles d'Euler en degrés.
averageRotation = eulerd(b,"ZYX","frame")
averageRotation = 1×3
0 0 0
Le coefficient d'interpolation est spécifié comme une valeur normalisée entre 0 et 1, inclus. Un coefficient d'interpolation de 0 correspond au quaternion a , et un coefficient d'interpolation de 1 correspond au c Quaternion $ . Appelez slerp avec les coefficients 0 et 1 pour confirmer.
b = slerp(a,c,[0,1]); eulerd(b,"ZYX","frame")
ans = 2×3
45.0000 0 0
-45.0000 0 0
Vous pouvez créer des chemins fluides entre les quaternions en spécifiant des tableaux de coefficients d'interpolation équidistants.
path = 0:0.1:1; interpolatedQuaternions = slerp(a,c,path);
Pour les quaternions qui représentent la rotation uniquement autour d'un seul axe, la spécification des coefficients d'interpolation comme étant équidistants entraîne des quaternions équidistants dans les angles d'Euler. Convertissez interpolatedQuaternions en angles d'Euler et vérifiez que la différence entre les angles du chemin est constante.
k = eulerd(interpolatedQuaternions,"ZYX","frame"); abc = abs(diff(k))
abc = 10×3
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
Alternativement, vous pouvez utiliser la fonction dist pour vérifier que la distance entre les quaternions interpolés est cohérente. La fonction dist renvoie la distance angulaire en radians ; convertir en degrés pour une comparaison facile.
def = rad2deg(dist(interpolatedQuaternions(2:end),interpolatedQuaternions(1:end-1)))
def = 1×10
9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000
L'algorithme SLERP interpole le long d'un chemin orthodromique reliant deux quaternions. Cet exemple montre comment l'algorithme SLERP minimise le chemin du grand cercle.
Définissez quatre quaternions :
q0- quaternion indiquant aucune rotation par rapport au référentiel globalq179- quaternion indiquant une rotation de 179 degrés autour de l'axe zq180- quaternion indiquant une rotation de 180 degrés autour de l'axe zq181- quaternion indiquant une rotation de 181 degrés autour de l'axe z
q0 = ones(1,"quaternion"); q179 = quaternion([179,0,0],"eulerd","ZYX","frame"); q180 = quaternion([180,0,0],"eulerd","ZYX","frame"); q181 = quaternion([181,0,0],"eulerd","ZYX","frame");
Utilisez slerp pour interpoler entre q0 et les trois rotations de quaternions. Précisez que les chemins sont parcourus en 10 étapes.
T = linspace(0,1,10); q179path = slerp(q0,q179,T); q180path = slerp(q0,q180,T); q181path = slerp(q0,q181,T);
Tracez chaque chemin en termes d'angles d'Euler en degrés.
q179pathEuler = eulerd(q179path,"ZYX","frame"); q180pathEuler = eulerd(q180path,"ZYX","frame"); q181pathEuler = eulerd(q181path,"ZYX","frame"); plot(T,q179pathEuler(:,1),"bo", ... T,q180pathEuler(:,1),"r*", ... T,q181pathEuler(:,1),"gd"); legend("Path to 179 degrees", ... "Path to 180 degrees", ... "Path to 181 degrees") xlabel("Interpolation Coefficient") ylabel("Z-Axis Rotation (Degrees)")

Le chemin entre q0 et q179 est dans le sens des aiguilles d'une montre pour minimiser la distance orthodromique. Le chemin entre q0 et q181 est dans le sens antihoraire pour minimiser la distance orthodromique. Le chemin entre q0 et q180 peut être dans le sens des aiguilles d'une montre ou dans le sens inverse, en fonction de l'arrondi numérique.
Créez deux quaternions.
q1 = quaternion([75,-20,-10],"eulerd","ZYX","frame"); q2 = quaternion([-45,20,30],"eulerd","ZYX","frame");
Définissez le coefficient d'interpolation.
T = 0:0.01:1;
Obtenez les quaternions interpolés.
quats = slerp(q1,q2,T);
Obtenez les points de rotation correspondants.
pts = rotatepoint(quats,[1 0 0]);
Montrez les quaternions interpolés sur une sphère unitaire.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceColor=[0.57 0.57 0.57]) hold on scatter3(pts(:,1),pts(:,2),pts(:,3)) view([69.23 36.60]) axis equal
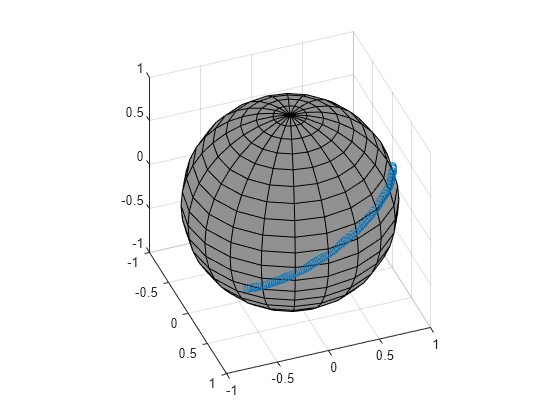
Notez que les quaternions interpolés suivent le chemin le plus court de q1 à q2.
Arguments d'entrée
Arguments de sortie
Algorithmes
L'interpolation l linéaire quaternionienne s sphérique (SLERP) est une extension de l'interpolation linéaire le long d'un plan à l'interpolation sphérique en trois dimensions. L'algorithme a été proposé pour la première fois dans [1]. Étant donné deux quaternions, q 1 et q 2 , SLERP interpole un nouveau quaternion, q 0 , le long du grand cercle qui relie q 1 et q 2 . Le coefficient d'interpolation, T, détermine la proximité du quaternion de sortie avec q 1 et q 2 .
L'algorithme SLERP peut être décrit en termes de sinusoïdes :
où q 1 et q 2 sont des quaternions normalisés, et θ est la moitié de la distance angulaire entre q 1 et q 2 .
Références
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics Vol. 19, Issue 3, 1985, pp. 245–254.
Capacités étendues
Historique des versions
Introduit dans R2019b