freqz
Réponse en fréquence d’un filtre numérique
Syntaxe
Description
[ renvoie la réponse en fréquence du filtre numérique spécifié. Définissez un filtre numérique avec les coefficients de numérateur h,w] = freqz(b,a,n)b et les coefficients de dénominateur a. La fonction renvoie le vecteur de réponses en fréquence à n points dans h et le vecteur de fréquences angulaires correspondantes w.
freqz(___) sans arguments de sortie trace la réponse en fréquence du filtre.
Exemples
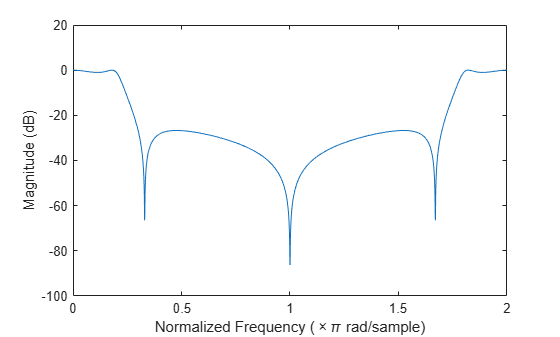
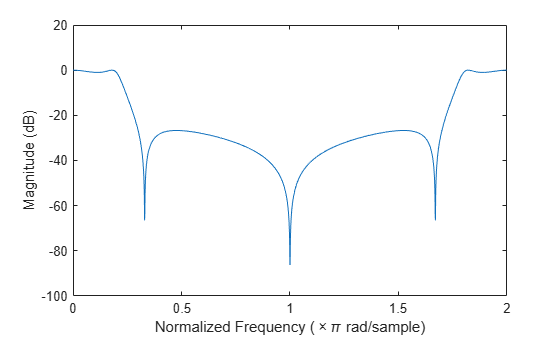
Calculez et affichez la réponse en amplitude du filtre IIR passe-bas de troisième ordre décrit par la fonction de transfert suivante :
Exprimez le numérateur et le dénominateur sous forme de convolutions polynomiales. Déterminez la réponse en fréquence à 2 001 points répartis tout autour du cercle unité.
b0 = 0.05634;
b1 = [1 1];
b2 = [1 -1.0166 1];
a1 = [1 -0.683];
a2 = [1 -1.4461 0.7957];
b = b0*conv(b1,b2);
a = conv(a1,a2);
[h,w] = freqz(b,a,"whole",2001);Tracez la réponse en amplitude exprimée en décibels.
plot(w/pi,20*log10(abs(h))) ax = gca; ax.YLim = [-100 20]; ax.XTick = 0:.5:2; xlabel("Normalized Frequency (\times\pi rad/sample)") ylabel("Magnitude (dB)")
Depuis R2024b
Créez un filtre de Tchebychev numérique de type II passe-bas d’ordre 40 avec une fréquence limite de la bande atténuée de 0,4 et une atténuation dans la bande coupée de 50 dB. Tracez la réponse en fréquence du filtre en utilisant ses coefficients au format CTF.
[B,A] = cheby2(40,50,0.4,"ctf"); freqz(B,A,"ctf")

Créez un filtre numérique elliptique passe-bande d’ordre 30 avec des fréquences limites de la bande passante de 0,3 et 0,7, une ondulation dans la bande passante de 0,1 dB et une atténuation dans la bande coupée de 50 dB. Tracez la réponse en fréquence du filtre en utilisant ses coefficients et son gain au format CTF.
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); freqz({B,A,g},"ctf")

Créez un filtre FIR passe-bas d’ordre 80 en utilisant une fenêtre de Kaiser avec . Définissez une fréquence de coupure normalisée de rad/échantillon. Affichez les réponses en amplitude et en phase du filtre.
b = fir1(80,0.5,kaiser(81,8)); freqz(b,1)
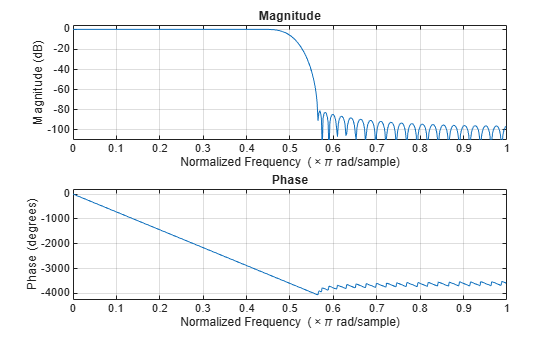
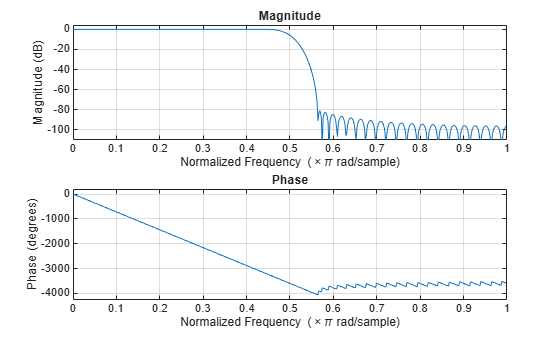
Créez le même filtre avec designfilt. Affichez ses réponses en amplitude et en phase.
d = designfilt("lowpassfir",FilterOrder=80, ... CutoffFrequency=0.5,Window={"kaiser",8}); freqz(d)
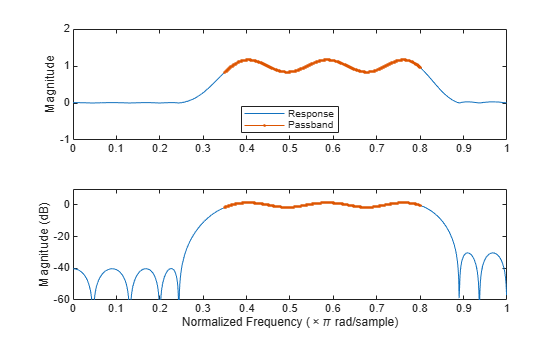
Créez un filtre FIR passe-bande avec une bande passante comprise entre et rad/échantillon et une ondulation de 3 dB. La première bande atténuée est comprise entre et rad/échantillon et son atténuation est de 40 dB. La deuxième bande atténuée est comprise entre rad/échantillon et la fréquence de Nyquist et son atténuation est de 30 dB. Calculez la réponse en fréquence. Tracez son amplitude en unités linéaires et en décibels. Mettez la bande passante en surbrillance.
sf1 = 0.1; pf1 = 0.35; pf2 = 0.8; sf2 = 0.9; pb = linspace(pf1,pf2,1e3)*pi; bp = designfilt("bandpassfir", ... StopbandAttenuation1=40,StopbandFrequency1=sf1, ... PassbandFrequency1=pf1,PassbandRipple=3, ... PassbandFrequency2=pf2,StopbandFrequency2=sf2, ... StopbandAttenuation2=30); [h,w] = freqz(bp,1024); hpb = freqz(bp,pb); subplot(2,1,1) plot(w/pi,abs(h),pb/pi,abs(hpb),'.-') axis([0 1 -1 2]) legend("Response","Passband",Location="south") ylabel("Magnitude") subplot(2,1,2) plot(w/pi,db(h),pb/pi,db(hpb),".-") axis([0 1 -60 10]) xlabel("Normalized Frequency (\times\pi rad/sample)") ylabel("Magnitude (dB)")
Calculez et affichez la réponse en amplitude du filtre IIR passe-bas de troisième ordre décrit par la fonction de transfert suivante :
Exprimez la fonction de transfert en fonction des sections de second ordre. Déterminez la réponse en fréquence à 2 001 points répartis tout autour du cercle unité.
b0 = 0.05634;
b1 = [1 1];
b2 = [1 -1.0166 1];
a1 = [1 -0.683];
a2 = [1 -1.4461 0.7957];
sos1 = [b0*[b1 0] [a1 0]];
sos2 = [b2 a2];
[h,w] = freqz([sos1;sos2],'whole',2001);Tracez la réponse en amplitude exprimée en décibels.
plot(w/pi,20*log10(abs(h))) ax = gca; ax.YLim = [-100 20]; ax.XTick = 0:.5:2; xlabel('Normalized Frequency (\times\pi rad/sample)') ylabel('Magnitude (dB)')
Arguments d'entrée
Arguments de sortie
En savoir plus
Conseils
Vous pouvez obtenir des filtres au format CTF, y compris le gain de mise à l’échelle. Utilisez les sorties des fonctions de design de filtres IIR numériques telles que
butter,cheby1,cheby2etellip. Indiquez l’argument de type de filtre"ctf"dans ces fonctions et spécifiez de renvoyerB,Aetgpour obtenir les valeurs d’échelle. (depuis R2024b)Si vous disposez d’un filtre multi-échantillonné irréductible, utilisez la fonction
freqzmr(DSP System Toolbox) pour l’analyser dans le domaine fréquentiel. Pour plus d’informations sur les filtres multi-échantillonnés irréductibles, veuillez consulter Overview of Multirate Filters (DSP System Toolbox). (depuis R2024a)La fonction
freqzmr(DSP System Toolbox) nécessite DSP System Toolbox™. (depuis R2024a)
Algorithmes
La réponse en fréquence d’un filtre numérique peut être interprétée comme la fonction de transfert évaluée à z = ejω [1].
La fonction freqz détermine la fonction de transfert à partir des polynômes (réels ou complexes) de numérateur et de dénominateur que vous spécifiez. Elle renvoie la réponse en fréquence complexe H(ejω) d’un filtre numérique. La réponse en fréquence est évaluée aux points d’échantillonnage déterminés par la syntaxe utilisée.
La fonction freqz utilise généralement un algorithme FFT pour calculer la réponse en fréquence dans les cas où vous ne n’indiquez pas un vecteur de fréquences comme argument en entrée. Elle calcule la réponse en fréquence comme le rapport entre les coefficients de numérateur et de dénominateur transformés et comblés avec des zéros pour obtenir la longueur désirée.
Lorsque vous indiquez un vecteur de fréquences en entrée, freqz évalue les polynômes à chaque point de fréquence et divise la réponse du numérateur par la réponse du dénominateur. Pour évaluer les polynômes, la fonction utilise la méthode de Horner.
Références
[1] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
[2] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.