PID Tuner
Régler les contrôleurs PID
Description
L'application PID Tuner règle automatiquement les gains du contrôleur PID d’un système physique SISO pour obtenir un bon équilibre entre performance et robustesse. Vous pouvez spécifier le type de contrôleur, par exemple PI, PID avec filtre dérivé ou contrôleurs PID à deux degrés de liberté (2-DOF). Les tracés d'analyse permettent d'examiner la performance du contrôleur dans les domaines temporel et fréquentiel. Vous pouvez affiner de manière interactive la performance du contrôleur afin d’ajuster la bande passante de la boucle et la marge de phase, ou pour favoriser le suivi du point de consigne ou le rejet des perturbations.
Vous pouvez utiliser PID Tuner avec un système physique représenté par un modèle numérique LTI tel qu'une fonction de transfert (tf) ou un modèle de représentation d'état (ss). Si vous disposez du logiciel Simulink® Control Design™, vous pouvez utiliser PID Tuner pour régler un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink. Si vous disposez du logiciel System Identification Toolbox™, vous pouvez utiliser l'application pour estimer un système physique à partir de données mesurées ou simulées et concevoir un contrôleur pour le système physique estimé.
Réglage interactif dans le Live Editor
Pour en savoir plus sur le réglage PID interactif dans le Live Editor, voir la tâche Tune PID Controller du Live Editor. Cette tâche vous permet de concevoir un contrôleur PID de manière interactive et génère automatiquement un code MATLAB® pour votre live script.
Ouvrir l'application PID Tuner
Toolstrip MATLAB : dans l'onglet Apps, sous Control System Design and Analysis, cliquez sur l’icône de l’application.
Invite de commande MATLAB : saisissez
pidTuner.Modèle Simulink : Dans la boîte de dialogue du bloc PID Controller ou PID Controller (2DOF), cliquez sur Tune.
Exemples
Paramètres
Le menu Plant affiche le nom du système physique actuel que PID Tuner utilise pour le design du contrôleur.
Changez le système physique actuel à l'aide des options de menu suivantes :
La liste des modèles LTI présents dans le navigateur de données PID Tuner.
Import: importez un nouveau modèle LTI à partir de l’espace de travail MATLAB.Re-Linearize Closed Loop: linéarisez le système physique à un autre moment instantané. Consultez Tune at Different Operating Point (Simulink Control Design). Cette option n'est disponible que lors du réglage d'un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink.Identify New Plant: utilisez l'identification du système pour obtenir un système physique à partir des données de réponse du système mesurées ou simulées (nécessite la System Identification Toolbox). Consultez :Estimer de manière interactive les paramètres du système physique à partir des données de réponse au moment de régler un contrôle PID pour un modèle LTI.
Interactively Estimate Plant from Measured or Simulated Response Data (Simulink Control Design) au moment de régler un bloc PID Controller dans un modèle Simulink.
Si vous réglez un contrôleur PID pour un système physique représenté par un modèle LTI, le système physique par défaut est le suivant :
Plant= 1, si vous avez ouvert PID Tuner à partir de l'onglet Apps du Toolstrip MATLAB, ou si vous avez utilisé la commandepidTunersans argument d'entrée.Le système physique que vous avez spécifié en tant qu’argument d'entrée dans
pidTuner.
Si vous réglez un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink, le système physique par défaut est linéarisé au point de fonctionnement spécifié par les conditions initiales du modèle. Consultez What Plant Does PID Tuner See? (Simulink Control Design)
Le type de contrôleur spécifie les termes présents dans le contrôleur PID. Par exemple, un régulateur PI comporte un terme proportionnel et un terme intégral. Un contrôleur PDF comporte un terme proportionnel et un terme dérivé filtré.
Si vous réglez un contrôleur pour un système physique représenté par un modèle LTI, utilisez le menu Type pour spécifier le type de contrôleur. Lorsque vous changez de type de contrôleur, PID Tuner conçoit automatiquement un nouveau contrôleur. Parmi les types de contrôle disponibles, citons les contrôleurs PID 2-DOF qui offrent une plus grande flexibilité dans le compromis entre le rejet des perturbations et le suivi de la référence. Pour plus de détails sur les types de contrôleur disponibles, consultez PID Controller Types for Tuning.
Si vous réglez un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink, le champ Type affiche le type de contrôleur spécifié dans la boîte de dialogue du bloc.
Ce champ indique la forme du contrôleur.
Si vous réglez un contrôleur pour un système physique représenté par un modèle LTI, utilisez le menu Form pour spécifier la forme du contrôleur. Pour plus d'informations sur les formes parallèle et standard, voir les pages de référence
pidetpidstd.Si vous réglez un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink, le champ Form affiche la forme de contrôleur spécifiée dans la boîte de dialogue du bloc.
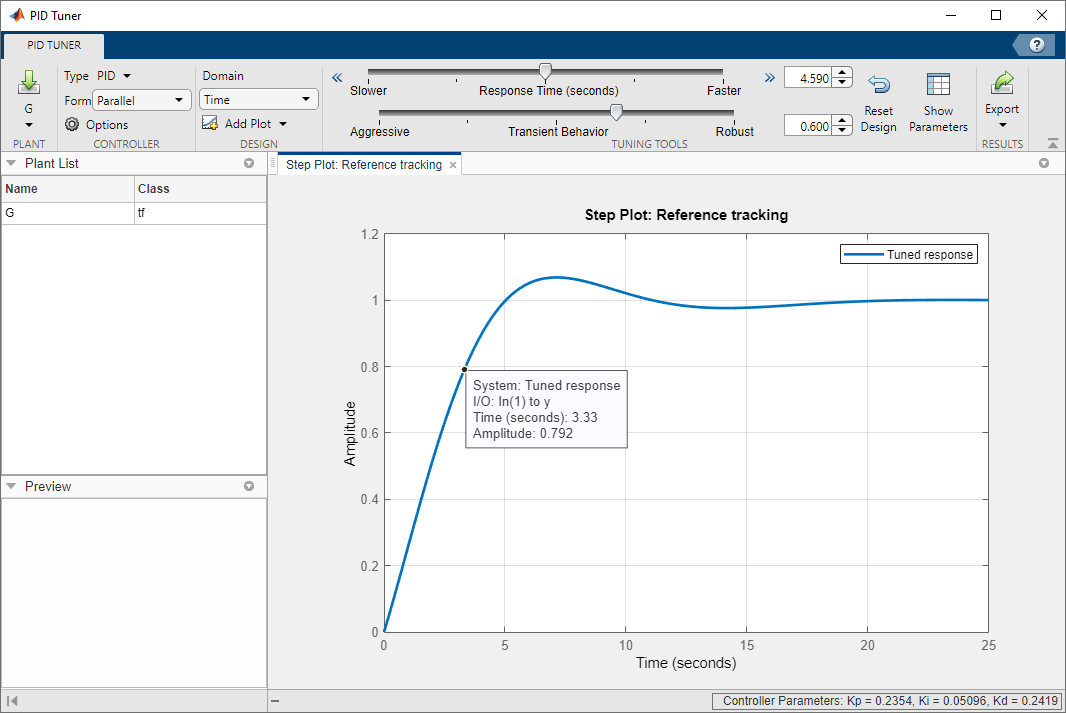
Le menu Domain vous permet de changer le domaine dans lequel PID Tuner affiche les paramètres de performances cibles.
Time: les curseurs permettent de régler Response Time et Transient Behavior.Frequency: les curseurs permettent de régler Bandwidth et Phase Margin.
Pour affiner le design du contrôleur, ajustez les paramètres de performances cibles à l'aide des curseurs ou des valeurs numériques correspondantes.

Pour plus d’informations, consultez :
Affiner le design (réglage d’un contrôleur pour un modèle LTI)
Refine the Design (Simulink Control Design) (réglage d’un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink)
Créez des tracés d'analyse dans les domaines temporel et fréquentiel pour faciliter l'analyse des performances du contrôleur PID. Pour obtenir des informations détaillées sur les tracés de réponse disponibles, consultez :
Analyser le design dans PID Tuner (réglage d’un contrôleur pour un modèle LTI)
Analyze Design in PID Tuner (Simulink Control Design) (réglage d’un bloc PID Controller ou PID Controller (2DOF) dans un modèle Simulink)
Utilisation programmatique
Conseils
Pour régler un contrôleur PID en ligne de commande, utilisez
pidtune. La commandepidtunepermet de concevoir un contrôleur pour plusieurs systèmes physiques à la fois.Pour en savoir plus sur le réglage PID interactif dans le Live Editor, voir la tâche Tune PID Controller du Live Editor. Cette tâche vous permet de concevoir un contrôleur PID de manière interactive et génère automatiquement un code MATLAB pour votre live script.
Historique des versions
Introduit dans R2010b