poseGraphSolverOptions
Options du solveur pour l'optimisation du graphique de pose
Description
solverOptions = poseGraphSolverOptions(solverType)
Exemples
Optimisez un graphique de pose en fonction des nœuds et des contraintes de bord. Boucle de coupe fermée en fonction de leurs erreurs résiduelles de bord.
Chargez l’ensemble de données contenant un graphique de pose 2D. Inspectez l'objet poseGraph pour afficher le nombre de nœuds et de fermetures de boucle.
load grid-2d-posegraph.mat pg disp(pg)
poseGraph with properties:
NumNodes: 120
NumEdges: 193
NumLoopClosureEdges: 74
LoopClosureEdgeIDs: [120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 ... ] (1x74 double)
LandmarkNodeIDs: [1x0 double]
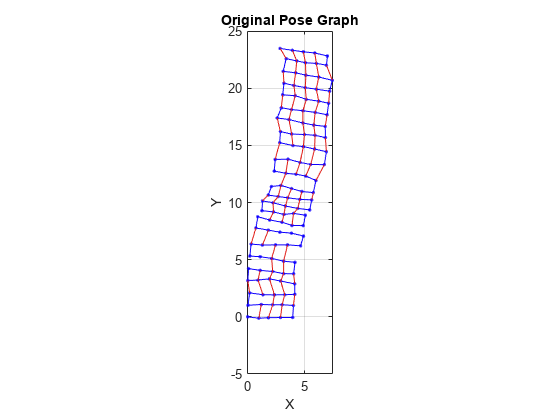
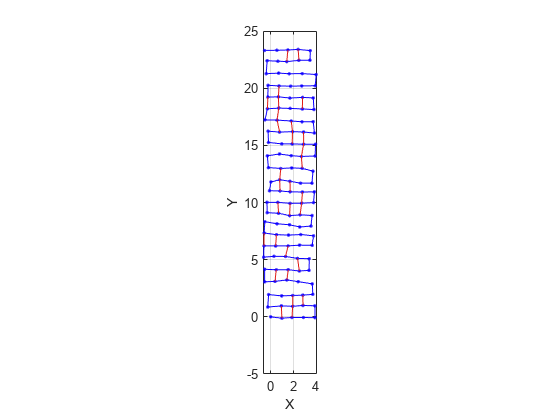
Tracez le graphique de pose sans les identifiants. Les lignes rouges indiquent les fermetures de boucles identifiées dans l'ensemble de données. Les poses dans le graphique doivent suivre un quadrillage, mais montrer des signes de dérive au fil du temps.
show(pg,'IDs','off'); title('Original Pose Graph')
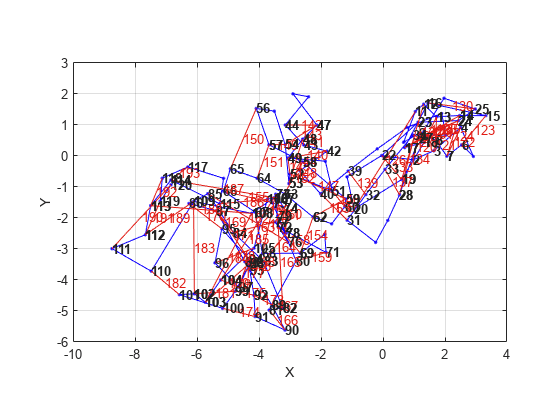
Optimisez le graphique de pose à l'aide de la fonction optimizePoseGraph . Par défaut, cette fonction utilise le solveur "builtin-trust-region" . Étant donné que le graphique de pose contient des fermetures de boucle incorrectes, le graphique de pose résultant n'est en réalité pas souhaitable.
pgOptim = optimizePoseGraph(pg); figure; show(pgOptim);
Examinez les erreurs résiduelles de bord pour le graphique de pose d'origine. De grandes valeurs d’erreur aberrantes à la fin indiquent de mauvaises fermetures de boucle.
resErrorVec = edgeResidualErrors(pg);
plot(resErrorVec);
title('Edge Residual Errors by Edge ID')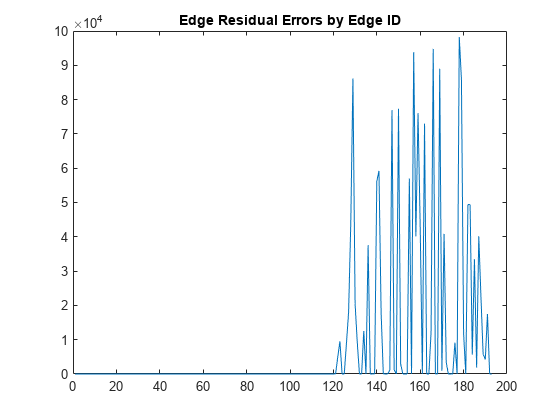
Certaines fermetures de boucles doivent être supprimées du graphique de pose en fonction de leur erreur résiduelle. Utilisez la fonction trimLoopClosures pour supprimer ces mauvaises fermetures de boucle. Définissez le seuil maximum et de troncature pour les paramètres de découpage. Ce seuil est défini en fonction de la précision des mesures et doit être adapté à votre système.
trimParams.MaxIterations = 100; trimParams.TruncationThreshold = 25; solverOptions = poseGraphSolverOptions;
Utilisez la fonction trimLoopClosures avec les paramètres de découpage et les options du solveur.
[pgNew, trimInfo, debugInfo] = trimLoopClosures(pg,trimParams,solverOptions);
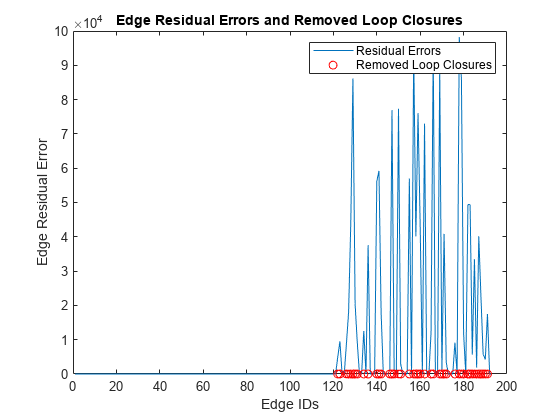
À partir de la sortie trimInfo , tracez les fermetures de boucle supprimées du graphique de pose optimisé. En traçant avec le tracé des erreurs résiduelles auparavant, vous pouvez voir que les grandes fermetures de boucles d'erreur ont été supprimées.
removedLCs = trimInfo.LoopClosuresToRemove; hold on plot(removedLCs,zeros(length(removedLCs)),'or') title('Edge Residual Errors and Removed Loop Closures') legend('Residual Errors', 'Removed Loop Closures') xlabel('Edge IDs') ylabel('Edge Residual Error') hold off
Affichez le nouveau graphique de pose avec les mauvaises fermetures de boucles supprimées.
show(pgNew,"IDs","off");
Arguments d'entrée
Arguments de sortie
Historique des versions
Introduit dans R2020b
Voir aussi
Fonctions
trimLoopClosures|edgeResidualErrors|edgeResidualErrors|removeEdges|edgeNodePairs|edgeConstraints