validatorVehicleCostmap
Validateur d'état basé sur une carte de coûts 2D
Description
L'objet validatorOccupancyMap valide les états et les mouvements discrétisés en fonction de la valeur dans une carte de coûts 2D. Un emplacement occupé sur la carte est interprété comme un état invalide.
Création
Syntaxe
Description
validator = validatorVehicleCostmap
validator = validatorVehicleCostmap(stateSpace)nav.StateSpace.
validator = validatorVehicleCostmap(stateSpace,Name,Value)Map ou XYIndices en utilisant les arguments de paire Name,Value .
Propriétés
Fonctions d'objet
copy | Créer une copie complète de l'objet validateur d'état |
isStateValid | Vérifiez si l'état est valide |
isMotionValid | Vérifiez si le chemin entre les états est valide |
Exemples
Cet exemple montre comment valider les chemins à travers un environnement.
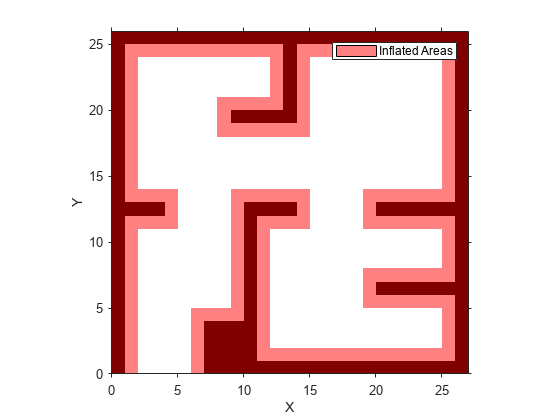
Chargez des exemples de cartes. Utilisez la carte simple pour créer une carte des coûts des véhicules. Précisez un rayon de gonflage de 1 mètre.
load exampleMaps.mat map = vehicleCostmap(double(simpleMap)); map.CollisionChecker = inflationCollisionChecker("InflationRadius",1); plot(map)
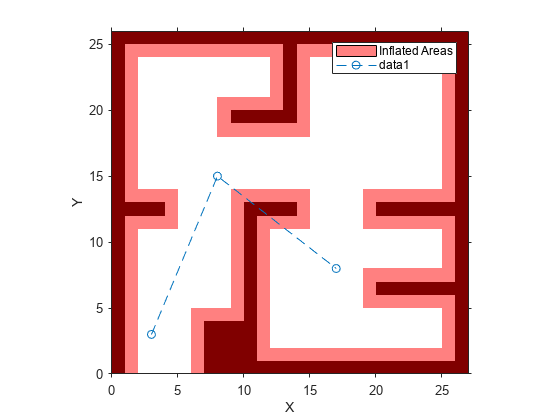
Spécifiez un chemin grossier à travers la carte.
path = [3 3 pi/2; 8 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
Créez un validateur d'état en utilisant la définition stateSpaceSE2 . Spécifiez la carte et la distance pour interpoler et valider les segments de chemin.
validator = validatorVehicleCostmap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Vérifiez que les points du chemin sont des états valides. Les trois points se trouvent dans un espace libre et sont donc considérés comme valides.
isValid = isStateValid(validator,path)
isValid = 3x1 logical array
1
1
1
Vérifiez le mouvement entre chaque état de chemin séquentiel. La fonction isMotionValid interpole le long du chemin entre les états. Si un segment de chemin n'est pas valide, tracez le dernier point valide le long du chemin.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off
Capacités étendues
Historique des versions
Introduit dans R2019b
Voir aussi
validatorOccupancyMap | stateSpaceSE2 | nav.StateSpace | nav.StateValidator