lookupPose
Obtenir des informations de pose pendant un certain temps
Description
[ renvoie les informations de pose de la trajectoire du waypoint aux heures d'échantillonnage spécifiées. Si une durée d'échantillonnage dépasse la durée de la trajectoire, les informations de pose correspondantes sont renvoyées sous la forme position,orientation,velocity,acceleration,angularVelocity] = lookupPose(traj,sampleTimes)NaN.
Exemples
Créez un objet waypointTrajectory qui connecte deux waypoints. La vitesse de la trajectoire aux deux waypoints est 0et 10, respectivement. Limiter la limite d'à-coup à 0,5pour activer le profil d'accélération trapézoïdale.
waypoints = [0 0 0;
10 50 10];
speeds = [0 10];
jerkLimit = 0.5;
trajectory = waypointTrajectory(waypoints,GroundSpeed=speeds,JerkLimit=jerkLimit);Obtenez l'heure initiale et l'heure finale de la trajectoire en interrogeant la propriété TimeOfArrival . Créez des horodatages pour échantillonner la trajectoire.
t0 = trajectory.TimeOfArrival(1); tf = trajectory.TimeOfArrival(end); sampleTimes = linspace(t0,tf,100);
Obtenez les informations de position, de vitesse et d'accélération à ces horodatages échantillonnés à l'aide de la fonction objet lookupPose .
[position,~,velocity,acceleration,~] = lookupPose(trajectory,sampleTimes);
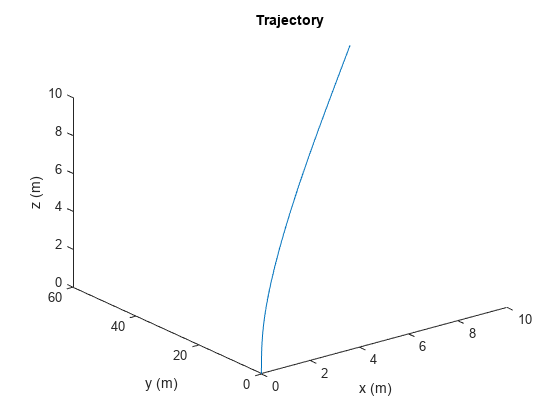
Tracez la trajectoire.
figure() plot3(position(:,1),position(:,2),position(:,3)) xlabel("x (m)") ylabel("y (m)") zlabel("z (m)") title("Trajectory")
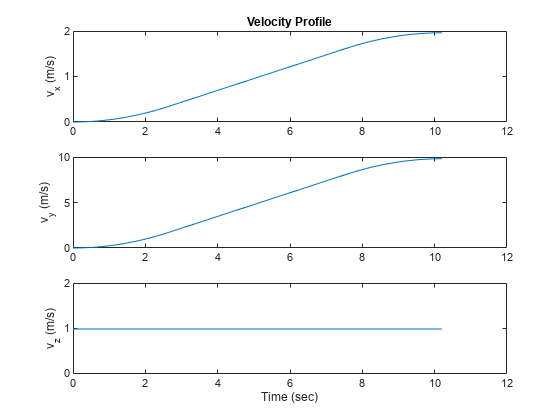
Tracez le profil de vitesse.
figure() subplot(3,1,1) plot(sampleTimes,velocity(:,1)); ylabel("v_x (m/s)") title("Velocity Profile") subplot(3,1,2) plot(sampleTimes,velocity(:,2)); ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,velocity(:,3)); ylabel("v_z (m/s)") xlabel("Time (sec)")
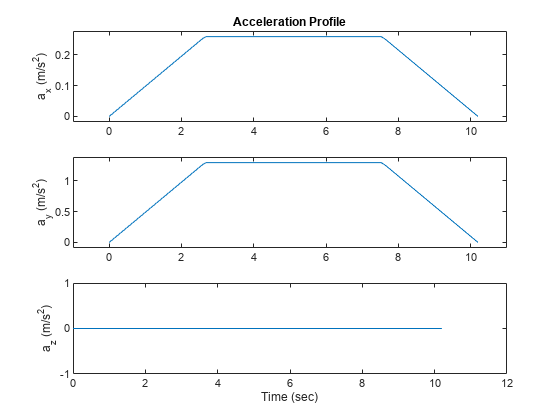
Tracez le profil d'accélération. D’après les résultats, le profil d’accélération du mouvement plan est trapézoïdal.
figure() subplot(3,1,1) plot(sampleTimes,acceleration(:,1)); axis padded ylabel("a_x (m/s^2)") title("Acceleration Profile") subplot(3,1,2) plot(sampleTimes,acceleration(:,2)); ylabel("a_y (m/s^2)") axis padded subplot(3,1,3) plot(sampleTimes,acceleration(:,3)); ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Arguments d'entrée
Arguments de sortie
Historique des versions
Introduit dans R2019b