La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
Traitement de nuages de points
Un nuage de points est un ensemble de points de données dans un espace 3D. Ces points représentent ensemble une forme ou un objet 3D. Chaque point du jeu de données correspond à une coordonnée géométrique x, y et z. Les nuages de points permettent d’assembler un grand nombre de mesures spatiales uniques dans un jeu de données pouvant être représenté sous forme d’objet descriptible. Le traitement de nuages de points est utilisé dans les systèmes de navigation et de perception des robots, d’estimation de la profondeur, de vision stéréo, de recalage visuel ainsi que dans les systèmes avancés d’aide à la conduite (ADAS). Les algorithmes de Computer Vision Toolbox™ proposent des fonctionnalités de traitement permettant le sous-échantillonnage, le débruitage et la transformation de nuages de points. La toolbox supporte également le recalage de nuages de points, l’ajustement de formes géométriques à des nuages de points 3D et la possibilité de lire, d’écrire, de stocker, d’afficher et de comparer des nuages de points. Vous pouvez combiner plusieurs nuages de points pour reconstruire une scène 3D. Vous pouvez également créer une carte avec des nuages de points recalés, détecter les fermetures de boucle, optimiser la carte pour corriger la dérive et effectuer une localisation dans la carte prédéfinie. Pour plus de précisions, veuillez consulter Implement Point Cloud SLAM in MATLAB.
Pour effectuer un recalage de nuages de points, c’est-à-dire aligner plusieurs nuages de points sur un même système de coordonnées, on choisit généralement un nuage de points de référence, ou nuage de points fixe, puis on aligne les autres nuages de points mobiles par rapport à celui-ci. La pose absolue d’un nuage de points désigne sa position et son orientation globales par rapport à un référentiel souvent appelé système de coordonnées mondial. Computer Vision Toolbox propose différentes techniques pour recaler un nuage de points mobile par rapport à un nuage de points fixe. Ces techniques sont notamment la corrélation de phase et les méthodes ICP (Iterative Closest Point), NDT (Normal Distributions Transform) et CPD (Coherent Point Drift). Vous pouvez également utiliser l’application Lidar Registration Analyzer (Lidar Toolbox) pour effectuer un recalage interactif et comparer les résultats en fonction des différentes techniques de recalage, des paramètres de réglage et des étapes de prétraitement.
Fonctions
Blocs
Rubriques
- Choose a Point Cloud Viewer
Compare visualization functions.
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
- The PLY Format
The Stanford Triangle Format.
- Getting Started with Point Clouds Using Deep Learning
Understand how to use point clouds for deep learning.
- Choose Function to Visualize Detected Objects
Compare visualization functions.
- Labeling, Segmentation, and Detection (Lidar Toolbox)
Label, segment, detect, and classify objects in point cloud data using deep learning and geometric algorithms
Sélection d՚exemples

Build a Map from Lidar Data Using SLAM
Process lidar data to build a map and estimate a vehicle trajectory using simultaneous localization and mapping.

Build a Map from Lidar Data Using SLAM on GPU
Perform 3-D simultaneous localization and mapping (SLAM) on an NVIDIA® GPU.

Build a Map from Lidar Data
Process 3-D lidar sensor data to progressively build a map, with assistance from inertial measurement unit (IMU) readings.
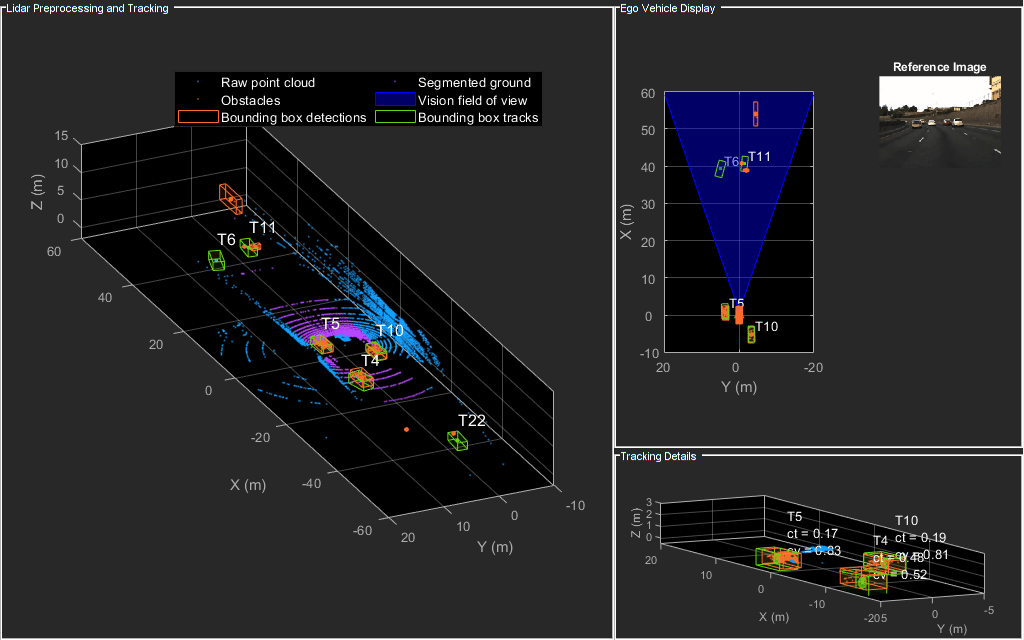
Detect and Track Vehicles Using Lidar Data
Track vehicles using measurements from a lidar sensor mounted on top of an ego vehicle.

Train Classification Network to Classify Object in 3-D Point Cloud
Train a classification network to classify objects in a 3-D point cloud.

3-D Point Cloud Registration and Stitching
Combine multiple point clouds to reconstruct a 3-D scene using Iterative Closest Point (ICP) algorithm. It then shows how to leverage color information available in the point clouds to improve the accuracy of the scene.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Record synthetic sensor data from a 3-D simulation environment, and develop a simultaneous localization and mapping (SLAM) algorithm using the recorded data.

Ground Plane and Obstacle Detection Using Lidar
Process 3-D lidar data from a sensor mounted on a vehicle by segmenting the ground plane and finding nearby obstacles.