checkCollision
Vérifiez si deux géométries sont en collision
Syntaxe
Description
collisionStatus = checkCollision(geom1,geom2)geom1 et geom2. Si les deux géométries sont en collision dans leurs poses spécifiées, collisionStatus est 1. Si la fonction ne trouve pas de collision, collisionStatus est 0.
[ renvoie la distance minimale collisionStatus,sepdist,witnesspts] = checkCollision(geom1,geom2)sepdist et les points témoins witnesspts de chaque géométrie lorsque la fonction ne trouve pas de collision entre les deux géométries.
Exemples
Cet exemple montre comment vérifier l'état de collision de deux géométries de collision.
Créez une géométrie de collision de boîtes.
bx = collisionBox(1,2,3);
Créez une géométrie de collision de cylindre.
cy = collisionCylinder(3,1);
Translatez le cylindre le long de l'axe x de 2.
T = trvec2tform([2 0 0]); cy.Pose = T;
Tracez les deux géométries.
show(cy) hold on show(bx) xlim([-5 5]) ylim([-5 5]) zlim([-5 5]) hold off

Vérifiez l'état de la collision. Confirmez que l'état est cohérent avec le tracé.
[areIntersecting,dist,witnessPoints] = checkCollision(bx,cy)
areIntersecting = 1
dist = NaN
witnessPoints = 3×2
NaN NaN
NaN NaN
NaN NaN
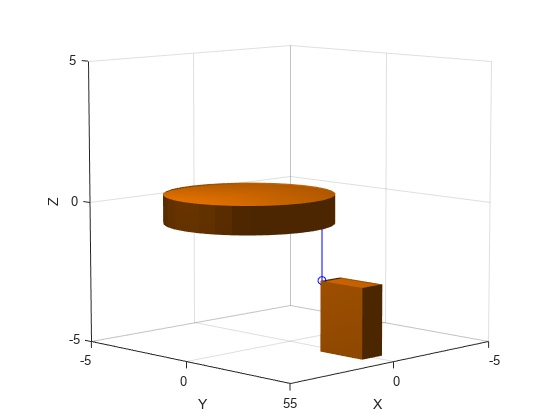
Traduisez la boîte le long de l'axe x de 3 et vers le bas de l'axe z de 4. Confirmez que la boîte et le cylindre n'entrent pas en collision.
T = trvec2tform([0 3 -4]); bx.Pose = T; [areIntersecting,dist,witnessPoints] = checkCollision(bx,cy)
areIntersecting = 0
dist = 2
witnessPoints = 3×2
0.4286 0.4286
2.0000 2.0000
-2.5000 -0.5000
Tracez la boîte, le cylindre et le segment de ligne représentant la distance minimale entre les deux géométries.
show(cy) hold on show(bx) wp = witnessPoints; plot3([wp(1,1) wp(1,2)], [wp(2,1) wp(2,2)], [wp(3,1) wp(3,2)], 'bo-') xlim([-5 5]) ylim([-5 5]) zlim([-5 5]) hold off
Créez deux capsules de collision. Centrez l'une à l'origine et réglez la pose de l'autre capsule à 3 mètres de l'origine sur l'axe y. Présentez les capsules.
cc1 = collisionCapsule(1,4); cc2 = collisionCapsule(1,4); cc2.Pose = trvec2tform([0 3 0]); show(cc1); hold on show(cc2); axis auto hold off
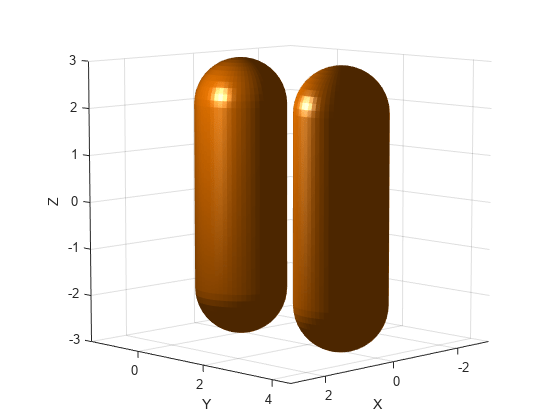
Vérifiez la collision entre les deux capsules de collision. Parce qu’ils n’entrent pas en collision visuellement, la fonction doit renvoyer des distances de séparation et des points témoins à valeur réelle. Affichez les distances de séparation et les points témoins.
[isColliding,separationDist,witnessPts] = checkCollision(cc1,cc2);
disp("Separation Distance: " + num2str(separationDist))Separation Distance: 1
disp("Capsule 1 Witness Point (X Y Z): " + num2str(witnessPts(:,1)'))Capsule 1 Witness Point (X Y Z): 0 1 -2
disp("Capsule 2 Witness Point (X Y Z): " + num2str(witnessPts(:,2)'))Capsule 2 Witness Point (X Y Z): 0 2 -2
Faites pivoter la deuxième capsule 90 degrés sur l'axe z.
cc2.Pose(1:3,1:3) = eul2rotm([0 0 pi/2]); show(cc1); hold on show(cc2); axis auto
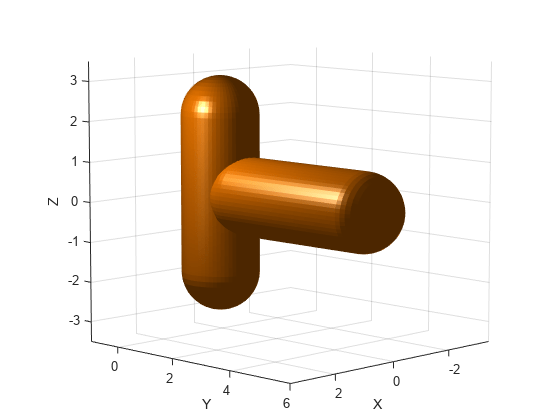
Vérifiez à nouveau la collision entre les capsules. Parce qu'ils sont en collision, la fonction renvoie la distance de séparation et les points témoins sous la forme NaN.
[isColliding,separationDist,witnessPts] = checkCollision(cc1,cc2);
disp("Separation Distance: " + num2str(separationDist))Separation Distance: NaN
disp("Capsule 1 Witness Point (X Y Z): " + num2str(witnessPts(:,1)'))Capsule 1 Witness Point (X Y Z): NaN NaN NaN
disp("Capsule 2 Witness Point (X Y Z): " + num2str(witnessPts(:,2)'))Capsule 2 Witness Point (X Y Z): NaN NaN NaN
Arguments d'entrée
Arguments de sortie
Limites
Les résultats de la vérification des collisions ne sont pas fiables lorsque la distance minimale est inférieure à 10-5 m.
Références
[1] Gilbert, E.G., D.W. Johnson, and S.S. Keerthi. "A fast procedure for computing the distance between complex objects in three-dimensional space." IEEE Journal on Robotics and Automation 4, no. 2 (April 1988): 193–203. https://doi.org/10.1109/56.2083.
Capacités étendues
Historique des versions
Introduit dans R2019b
Voir aussi
collisionBox | collisionCapsule | collisionCylinder | collisionMesh | collisionSphere