predict
Description
predict( prédit l'état et la covariance des erreurs d'état. slamObj,controlInput)predict utilise la propriété StateTransitionFcn de l'objet ekfSLAM , slamObj et l'entrée du contrôleur controlInput pour prédire l'état.
predict( transmet tous les arguments supplémentaires spécifiés dans slamObj,controlInput,varargin)varargin à la propriété StateTransitionFcn sous-jacente de slamObj.
La première entrée dans StateTransitionFcn est la pose du pas de temps précédent, suivie de tous les arguments définis par l'utilisateur dans varargin.
Exemples
Chargez un ensemble de données de piste de course contenant l'état initial du véhicule, la covariance de l'état initial du véhicule, la covariance du bruit de processus, l'entrée de commande, la taille du pas de temps, la mesure, la covariance de la mesure et les valeurs de la porte de validation.
load("racetrackDataset.mat","initialState","initialStateCovariance", ... "processNoise","controllerInputs","timeStep", ... "measurements","measCovar","validationGate");
Créez un objet ekfSLAM avec l'état initial, la covariance de l'état initial et le bruit de processus.
ekfSlamObj = ekfSLAM("State",initialState, ... "StateCovariance",initialStateCovariance, ... "ProcessNoise",processNoise);
Initialisez une variable pour stocker la pose.
storedPose = nan(size(controllerInputs,1)+1,3); storedPose(1,:) = ekfSlamObj.State(1:3);
Prédisez l'état à l'aide de l'entrée de contrôle et de la taille du pas de temps pour la fonction de transition d'état. Ensuite, corrigez l’état à l’aide des données des points de repère observés, de la covariance des mesures et de la porte de validation pour la fonction d’association de données.
for count = 1:size(controllerInputs,1) % Predict the state predict(ekfSlamObj,controllerInputs(count,:),timeStep); % Get the landmarks in the environment observedLandmarks = measurements{count}; % Correct the state if ~isempty(observedLandmarks) correct(ekfSlamObj,observedLandmarks, ... measCovar,validationGate); end % Log the estimated pose storedPose(count+1,:) = ekfSlamObj.State(1:3); end
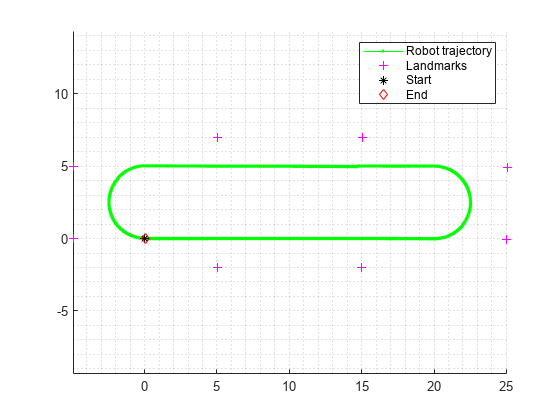
Visualisez la carte créée.
fig = figure; figAx = axes(fig); axis equal grid minor hold on plot(figAx,storedPose(:,1),storedPose(:,2),"g.-") landmarks = reshape(ekfSlamObj.State(4:end),2,[])'; plot(figAx,landmarks(:,1),landmarks(:,2),"m+") plot(figAx,storedPose(1,1),storedPose(1,2),"k*") plot(figAx,storedPose(end,1),storedPose(end,2),"rd") legend("Robot trajectory","Landmarks","Start","End")
Arguments d'entrée
Capacités étendues
Historique des versions
Introduit dans R2021b