Design de contrôles utilisant la représentation d’état
Les méthodes de design des contrôles utilisant la représentation d’état, telles que les algorithmes LQG/LQR et de placement des pôles, sont utiles pour le design MIMO.
Fonctions
Rubriques
- Design d'une commande linéaire-quadratique-gaussienne (LQG)
La commande linéaire-quadratique-gaussienne (LQG) est une technique à base d'espace d'état qui vous permet de faire un compromis entre les performances de régulation/tracker et la consommation, mais aussi de prendre en compte les perturbations du processus et le bruit des mesures.
- LQG Regulation: Rolling Mill Case Study
Use linear-quadratic-Gaussian techniques to regulate the beam thickness in a steel rolling mill.
- Design LQG Tracker Using Control System Designer
Design a feedback controller for a disk drive read/write head using LQG synthesis.
- Design Yaw Damper for Jet Transport
This case study illustrates the classical design process.
- Design d'un régulateur LQG
Concevez un régulateur LQG pour une sortie de système physique avec du bruit.
- Design d'un servo-contrôleur LQG
Concevez un servo-contrôleur LQG utilisant un estimateur d'état de Kalman.
- Design d'un servo-contrôleur LQR dans Simulink
Concevez un contrôleur LQR pour un système modélisé dans Simulink®.
- Placement des pôles
Les emplacements des pôles en boucle fermée ont un impact direct sur les caractéristiques de la réponse temporelle telles que le temps de montée, le temps de stabilisation et les oscillations transitoires. Le placement des pôles utilise des techniques basées sur les espaces d'état pour attribuer les pôles en boucle fermée.
Sélection d՚exemples

Contrôle de moteur DC
Comparer trois techniques de contrôle de moteur DC permettant le pistage des commandes de consigne et la réduction de la sensibilité aux perturbations de charge.
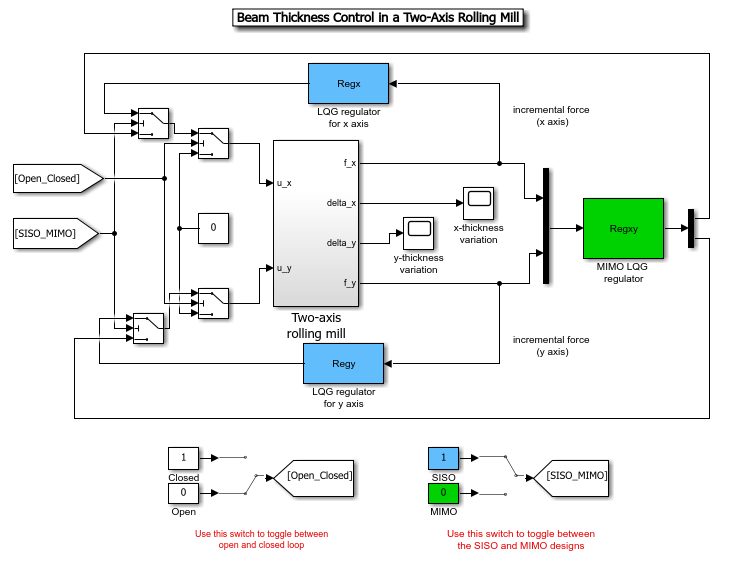
Thickness Control for a Steel Beam
Design a MIMO LQG regulator to control the horizontal and vertical thickness of a steel beam in a hot steel rolling mill.

Regulate Pressure in Drum Boiler
Use Simulink® Control Design™ software, using a drum boiler as an example application. Using the operating point search function, the example illustrates model linearization as well as subsequent state observer and LQR design. In this drum-boiler model, the control problem is to regulate boiler pressure in the face of random heat fluctuations from the furnace by adjusting the feed water flow rate and the nominal heat applied. For this example, 95% of the random heat fluctuations are less than 50% of the nominal heating value, which is not unusual for a furnace-fired boiler.