addRelativePose
Ajouter une pose relative au graphique de pose
Syntaxe
Description
addRelativePose( crée un nœud basé sur l'entrée poseGraph,measurement)measurement qui se connecte au dernier nœud de pose dans le graphique de pose. Pour ajouter des nœuds de repère, consultez la fonction addPointLandmark .
addRelativePose( spécifie également la matrice d'informations dans le cadre de la contrainte de bord, qui représente l'incertitude de la mesure de pose.poseGraph,measurement,infoMat)
addRelativePose( crée un nouveau nœud de pose et le connecte au nœud spécifique spécifié par poseGraph,measurement,infoMat,fromNodeID)fromNodeID.
addRelativePose( crée un bord en spécifiant une mesure de pose relative entre les nœuds existants spécifiés par poseGraph,measurement,infoMat,fromNodeID,toNodeID)fromNodeID et toNodeID. Cette arête est appelée fermeture de boucle. Si une fermeture de boucle existe déjà, la fonction ajoute la nouvelle mesure. L’appel de la fonction optimizePoseGraph combine plusieurs mesures ajoutées en une seule arête. Cette syntaxe ne prend pas en charge l'ajout d'arêtes à un nœud de repère.
Exemples
Cet exemple montre comment identifier et supprimer les fermetures de boucles parasites du graphique de pose. Pour ce faire, vous pouvez modifier la pose relative d'un bord de fermeture de boucle et essayer d'optimiser le graphique de pose avec et sans supprimer la fermeture de boucle parasite automatique et comparer les résultats.
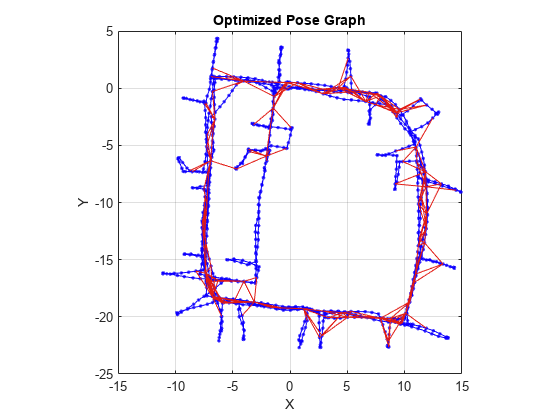
Chargez le Intel Research Lab Dataset qui contient un graphique de pose 2D. Optimisez le graphique de pose. Tracez le graphique de pose sans les identifiants. Les lignes rouges indiquent les fermetures de boucles identifiées dans l'ensemble de données.
load intel-2d-posegraph.mat pg optimizedPG = optimizePoseGraph(pg); show(optimizedPG,IDs="off"); title("Optimized Pose Graph")
Modifiez la pose relative du bord de fermeture de boucle 1386 en quelques valeurs aléatoires.
loopclosureId = 1386; nodePair = edgeNodePairs(optimizedPG,loopclosureId); [relPose,infoMat] = edgeConstraints(optimizedPG,loopclosureId); relPose(2) = -5; relPose(3) = 1.5; addRelativePose(optimizedPG,relPose,infoMat,nodePair(1),nodePair(2));
Optimisez le graphique de pose sans découpage automatique de la fermeture de boucle. Tracez le graphique de pose optimisé pour voir le mauvais ajustement des nœuds avec des fermetures de boucle.
[updatedPG,solutionInfo] = optimizePoseGraph(optimizedPG); show(updatedPG,IDs="off"); title("Updated Pose Graph")

Certaines fermetures de boucles doivent être supprimées du graphique de pose. Utilisez la fonction trimLoopClosures pour supprimer ces mauvaises fermetures de boucle. Définissez le seuil de troncature et les itérations maximales pour les paramètres de découpage.
trimParams = struct("TruncationThreshold",0.5,"MaxIterations",100);
Générez des options de solveur.
solverOptions = poseGraphSolverOptions("g2o-levenberg-marquardt");Utilisez la fonction trimLoopClosures avec les paramètres de découpage et les options du solveur. Tracez le nouveau graphique de pose pour voir que les mauvaises fermetures de boucles ont été supprimées.
[newPG,trimInfo] = trimLoopClosures(updatedPG,trimParams,solverOptions); show(newPG,IDs="off"); title("New Pose Graph")

Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2019b